|
Weblog: Recent Changes

in Dobrica Pavlinušić's random unstructured stuff
|
|
|
Connect external monitors to your system via Wifi-Display specification also known as Miracast https://github.com/albfan/miraclecast/
Hostname is misleading, this is rpi3 root@rpi2:/nuc/miraclecast/res# tail -14 /proc/cpuinfo processor : 3 model name : ARMv7 Processor rev 4 (v7l) BogoMIPS : 38.40 Features : half thumb fastmult vfp edsp neon vfpv3 tls vfpv4 idiva idivt vfpd32 lpae evtstrm crc32 CPU implementer : 0x41 CPU architecture: 7 CPU variant : 0x0 CPU part : 0xd03 CPU revision : 4 Hardware : BCM2835 Revision : a02082 Serial : 000000004d092298 check wifi chipset compatibilityroot@rpi2:/nuc/miraclecast/res# ./test-hardware-capabilities.sh wlan0 supports P2P compile and installroot@rpi2:/nuc/miraclecast# git remote -v origin https://github.com/albfan/miraclecast (fetch) origin https://github.com/albfan/miraclecast (push) pi@rpi2 /nuc/miraclecast $ sudo apt-get install libudev-dev libreadline-dev gstreamer1.0-tools pi@rpi2 /nuc/miraclecast $ ./autogen.sh c make sudo make install connect from Androidroot@rpi2:~# miracle-wifid --log-level trace & root@rpi2:/home/pi/miraclecast# miracle-sinkctl [ADD] Link: 3 [miraclectl] # run 3 now running on link 3 try to connect from android phone and fail [ADD] Peer: ce:fa:00:af:9a:5a@3 [PROV] Peer: ce:fa:00:af:9a:5a@3 Type: pbc PIN: [GO NEG] Peer: ce:fa:00:af:9a:5a@3 Type: pbc PIN: [GO NEG] Peer: ce:fa:00:af:9a:5a@3 Type: pbc PIN: [FAIL] Peer: ce:fa:00:af:9a:5a@3 Reason: group owner negotiation failed [miraclectl] #  Second try at buying USB TV card that works under Linux And sure, 22 EUR later (chepest card in the shop which included remote) I had working DVB-T under Linux Infohttp://linuxtv.org/wiki/index.php/Hauppauge_WinTV-NOVA-T-Stick Firmwarecd /lib/firmware/ wget http://www.wi-bw.tfh-wildau.de/~pboettch/home/linux-dvb-firmware/dvb-usb-dib0700-1.10.fw infodpavlin@t61p:~$ lsusb | grep Nova Bus 002 Device 003: ID 2040:7070 Hauppauge Nova-T Stick 3 Zagreb frequenciesT 754000000 8MHz 2/3 NONE AUTO 8k 1/8 NONE # CH27: T 642000000 8MHz 2/3 NONE AUTO 8k 1/8 NONE # CH27: T 690000000 8MHz 2/3 NONE AUTO 8k 1/8 NONE # CH27: Feed that file to scan from dvb-apps to get output for mplayer's channels.conf EeePC as TV for my mother
fetchrss: http://svn.rot13.org/index.cgi/mplayer-eee-tv/rss
dmesg[352538.540055] usb 3-1.1: new high-speed USB device number 32 using ehci-pci [352538.648944] usb 3-1.1: New USB device found, idVendor=2040, idProduct=7070, bcdDevice= 1.00 [352538.648951] usb 3-1.1: New USB device strings: Mfr=1, Product=2, SerialNumber=3 [352538.648956] usb 3-1.1: Product: Nova-T Stick [352538.648960] usb 3-1.1: Manufacturer: Hauppauge [352538.648964] usb 3-1.1: SerialNumber: 4032258708 [352538.682065] dvb-usb: found a 'Hauppauge Nova-T Stick' in cold state, will try to load a firmware [352538.682869] usb 3-1.1: firmware: direct-loading firmware dvb-usb-dib0700-1.20.fw [352538.885559] dib0700: firmware started successfully. [352539.420241] dvb-usb: found a 'Hauppauge Nova-T Stick' in warm state. [352539.420476] dvb-usb: will pass the complete MPEG2 transport stream to the software demuxer. [352539.420571] dvbdev: DVB: registering new adapter (Hauppauge Nova-T Stick) [352539.664695] usb 3-1.1: DVB: registering adapter 0 frontend 0 (DiBcom 7000PC)... [352539.903507] dib0070: DiB0070: successfully identified [352539.936061] Registered IR keymap rc-dib0700-rc5 [352539.936410] rc rc0: Hauppauge Nova-T Stick as /devices/pci0000:00/0000:00:1d.0/usb3/3-1/3-1.1/rc/rc0 [352539.936486] input: Hauppauge Nova-T Stick as /devices/pci0000:00/0000:00:1d.0/usb3/3-1/3-1.1/rc/rc0/input13 [352539.936674] rc rc0: lirc_dev: driver dib0700 registered at minor = 0, scancode receiver, no transmitter [352539.936678] dvb-usb: schedule remote query interval to 50 msecs. [352539.936682] dvb-usb: Hauppauge Nova-T Stick successfully initialized and connected. [352539.936876] usbcore: registered new interface driver dvb_usb_dib0700 scan
dpavlin@klin:~$ mkdir ~/.{a,c,s,t}zap
dpavlin@klin:~$ scan -v /usr/share/dvb/dvb-legacy/dvb-t/hr-All > .tzap/channels.conf
dumping lists (4 services)
[0015]:690000000:INVERSION_AUTO:BANDWIDTH_8_MHZ:FEC_3_4:FEC_AUTO:QAM_64:TRANSMISSION_MODE_8K:GUARD_INTERVAL_1_4:HIERARCHY_NONE:2011:2012:21
[0016]:690000000:INVERSION_AUTO:BANDWIDTH_8_MHZ:FEC_3_4:FEC_AUTO:QAM_64:TRANSMISSION_MODE_8K:GUARD_INTERVAL_1_4:HIERARCHY_NONE:2021:2022:22
[0017]:690000000:INVERSION_AUTO:BANDWIDTH_8_MHZ:FEC_3_4:FEC_AUTO:QAM_64:TRANSMISSION_MODE_8K:GUARD_INTERVAL_1_4:HIERARCHY_NONE:2031:2032:23
[0018]:690000000:INVERSION_AUTO:BANDWIDTH_8_MHZ:FEC_3_4:FEC_AUTO:QAM_64:TRANSMISSION_MODE_8K:GUARD_INTERVAL_1_4:HIERARCHY_NONE:2041:2042:24
dpavlin@klin:~$ /usr/bin/tzap -r -c ~/.tzap/channels.conf "[0018]"
using '/dev/dvb/adapter0/frontend0' and '/dev/dvb/adapter0/demux0'
reading channels from file '/home/dpavlin/.tzap/channels.conf'
Version: 5.11 FE_CAN { DVB-T }
tuning to 690000000 Hz
video pid 0x07f9, audio pid 0x07fa
status 0f | signal 9dca | snr 00ad | ber 001fffff | unc 00000000 |
status 1f | signal 9cd0 | snr 00bc | ber 000060a0 | unc 00000000 | FE_HAS_LOCK
dpavlin@klin:~$ mplayer /dev/dvb/adapter0/dvr0
PrintrBot_Plus_LC.diff
Old 3D printer which never worked well. DXF files: https://www.youmagine.com/designs/printrbot-lc-1302 https://web.archive.org/web/20130115210644/http://printrbot.com/shop/plus/ PrintrBot Plus LCThe Printrbot PLUS is the larger printrbot kit–containing an 8x8x8 build volume, laser cut birch construction, an assembled Ubis hot end, and 12mm Z-axis rods in an all-in-one kit. This kit also includes 1 lb of ABS filament. This kit includes everything you need to build the printrbot PLUS:
nozzle
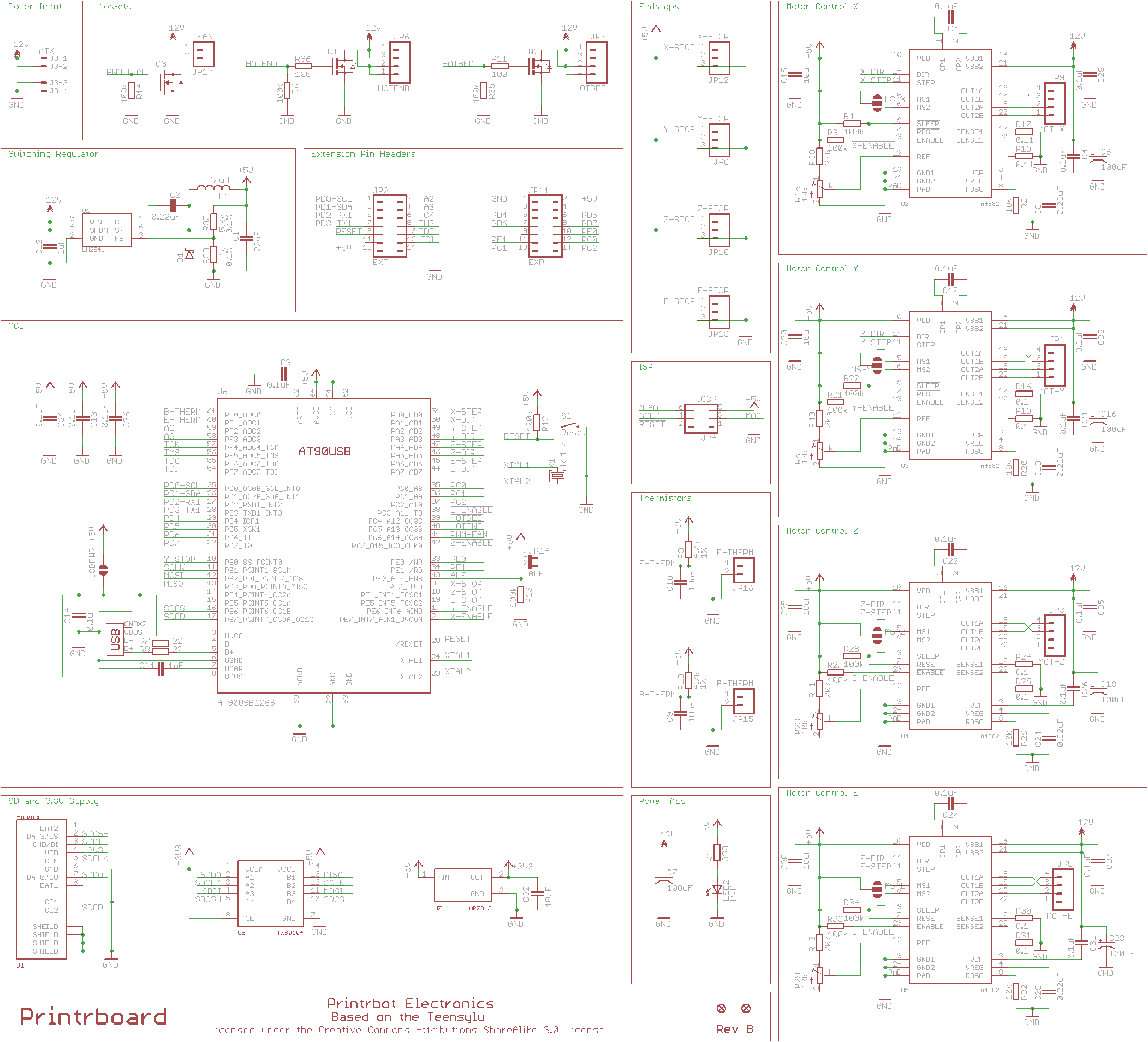
The Getting Started Guide says that all Printrbots currently ship with 0.4mm nozzles. infoMost of information about it vanished from internet so here is some overview: Rev.B https://github.com/Printrbot/printrboard/releases/tag/revB PrintrBoard pinoutAnnotated headers from http://blog.think3dprint3d.com/2012/07/panelolu-with-printrboard.html 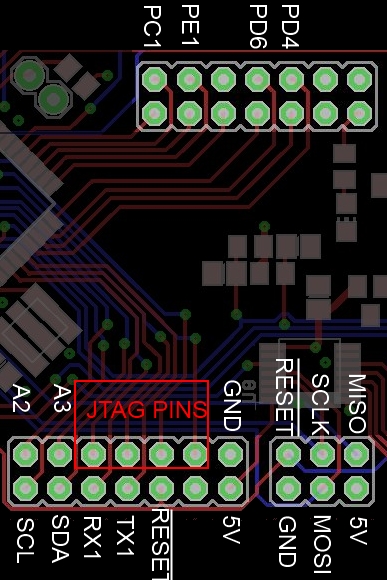 serial[Sun Mar 18 08:23:50 2018] usb 2-4.4: new full-speed USB device number 61 using xhci_hcd [Sun Mar 18 08:23:50 2018] usb 2-4.4: New USB device found, idVendor=16c0, idProduct=0483 [Sun Mar 18 08:23:50 2018] usb 2-4.4: New USB device strings: Mfr=1, Product=2, SerialNumber=3 [Sun Mar 18 08:23:50 2018] usb 2-4.4: Product: USB Serial [Sun Mar 18 08:23:50 2018] usb 2-4.4: Manufacturer: Teensyduino [Sun Mar 18 08:23:50 2018] usb 2-4.4: SerialNumber: 12345 [Sun Mar 18 08:23:50 2018] cdc_acm 2-4.4:1.0: ttyACM0: USB ACM device dpavlin@nuc:~$ microcom p /dev/ttyACM0 connected to /dev/ttyACM0 Escape character: Ctrl\ Type the escape character to get to the prompt. start echo:PowerUp Brown out Reset Marlin: 1.0.0 RC2 echo: Last Updated: 2012-02-25 | Author: erik echo: Free Memory: 4907 Pla echo:SD init fail workDir open failed echo:Unknown command:"echo" ok echo:Unknown command:"SD init fail" ok echo:Unknown command:"workDir open failed" ok settingshttps://github.com/Printrbot/Marlin M501 echo:Stored settings retreived: echo:Steps per unit: echo: M92 X62.11 Y64.67 Z2272.72 E536.00 echo:Maximum feedrates (mm/s): echo: M203 X60.00 Y60.00 Z2.00 E14.00 echo:Maximum Acceleration (mm/s2): echo: M201 X2000 Y2000 Z30 E10000 echo:Acceleration: S=acceleration, T=retract acceleration echo: M204 S3000.00 T3000.00 echo:Advanced variables: S=Min feedrate (mm/s), T=Min travel feedrate (mm/s), B=minimum segment time (ms), X=maximum xY jerk (mm/s), Z=maximum Z jerk (mm/s) echo: M205 S0.00 T0.00 B20000 X20.00 Z0.40 E5.00 echo:PID settings: echo: M301 P22.20 I1.08 D114.00 M115 FIRMWARE_NAME:Marlin V1; Sprinter/grbl mashup for gen6 FIRMWARE_URL:http://www.mendel-parts.com PROTOCOL_VERSION:1.0 MACHINE_TYPE:Mendel EXTRUDER_COUNT:1 If this doesn't work, you can try M503 which should display all settings without loading them from flash. software bed levelerschematicsPrintrboard_RevB_Schematic150.pngPrintrboard-schematics.pdf Marlindpavlin@nuc:/nuc/PrintrBot$ git clone https://github.com/dpavlin/Marlin dpavlin@nuc:/nuc/PrintrBot$ cd Marlin/ compile Marlin 1.1.8https://github.com/dpavlin/Marlin/tree/PrintrBot_Plus_LC-1.1.8 dpavlin@nuc:/nuc/PrintrBot/Marlin$ git checkout PrintrBot_Plus_LC-1.1.8 dpavlin@nuc:/nuc/PrintrBot/Marlin$ platformio run -e printrboard Warning! Ignore unknown `envs_dir` option in `[platformio]` section Processing printrboard (platform: teensy; board: teensy20pp; framework: arduino) ----------------------------------------------------------------------------------------------------------------------- Verbose mode can be enabled via `-v, --verbose` option PLATFORM: Teensy > Teensy++ 2.0 SYSTEM: AT90USB1286 16MHz 8KB RAM (127KB Flash) compile Marlin 1.1.9different enviroment compared to 1.1.8? dpavlin@nuc:/nuc/PrintrBot/Marlin$ git checkout PrintrBot_Plus_LC-1.1.9 dpavlin@nuc:/nuc/PrintrBot/Marlin$ platformio run -e teensy20 flashingopen boot jumper, press button
[Sun Apr 15 12:20:34 2018] usb 1-1.1: new full-speed USB device number 30 using xhci_hcd
[Sun Apr 15 12:20:34 2018] usb 1-1.1: unable to get BOS descriptor
[Sun Apr 15 12:20:34 2018] usb 1-1.1: New USB device found, idVendor=03eb, idProduct=2ffb
[Sun Apr 15 12:20:34 2018] usb 1-1.1: New USB device strings: Mfr=1, Product=2, SerialNumber=3
[Sun Apr 15 12:20:34 2018] usb 1-1.1: Product: AT90USB128 DFU
[Sun Apr 15 12:20:34 2018] usb 1-1.1: Manufacturer: ATMEL
[Sun Apr 15 12:20:34 2018] usb 1-1.1: SerialNumber: 1.0.0
root@nuc:/nuc/PrintrBot/Marlin# apt-get install dfu-programmer
root@nuc:/nuc/PrintrBot/Marlin# dfu-programmer --targets 2>&1 | grep at90usb128
at89c5132 at90usb1287 at90usb1286 at90usb1287-4k
at90usb1286-4k at90usb647 at90usb646 at90usb162
root@nuc:/nuc/PrintrBot/Marlin# dfu-programmer at90usb1286 dump --debug 99
target: at90usb1286
chip_id: 0x2ffb
vendor_id: 0x03eb
command: dump
quiet: false
debug: 99
device_type: AVR
------ command specific below ------
commands.c:625: dump 122880 bytes
atmel.c:579: atmel_read_flash( 0x7ffe83facaf0, 0x00000000, 0x0001e000, 0x564ef5df7000, 122880, false )
atmel.c:847: atmel_select_page( 0x7ffe83facaf0, 0 )
atmel.c:510: __atmel_read_page( 0x7ffe83facaf0, 0, 65536, 0x564ef5df7000, false )
atmel.c:537: result: -9
Unknown error. Try enabling debug.
Failed to read 122880 bytes from device.
other useful debug levels are 100, 200, 300 - https://www.avrfreaks.net/forum/how-use-dfu-programmer hmmm... can't backup firmware? flash firmware
dpavlin@nuc:/nuc/PrintrBot/Marlin$ dfu-programmer at90usb1286 erase
dpavlin@nuc:/nuc/PrintrBot/Marlin$ dfu-programmer at90usb1286 flash .pioenvs/printrboard/firmware.hex
Validating...
Flash did not validate. Did you erase first?
dpavlin@nuc:/nuc/PrintrBot/Marlin$ dfu-programmer at90usb1286 erase --debug 100
target: at90usb1286
chip_id: 0x2ffb
vendor_id: 0x03eb
command: erase
quiet: false
debug: 100
device_type: AVR
------ command specific below ------
validate: true
commands.c:69: erase 122879 bytes
atmel.c:281: atmel_erase_flash( 0x7ffc5df9bff0, 4 )
atmel.c:671: atmel_blank_check( 0x7ffc5df9bff0, 0x00000000, 0x0001dfff )
atmel.c:847: atmel_select_page( 0x7ffc5df9bff0, 0 )
atmel.c:647: __atmel_blank_check_internal( 0x7ffc5df9bff0, 0x00000000, 0x0000ffff )
atmel.c:847: atmel_select_page( 0x7ffc5df9bff0, 1 )
atmel.c:647: __atmel_blank_check_internal( 0x7ffc5df9bff0, 0x00000000, 0x0000dfff )
teensy setup pjrc
udev rule: https://www.pjrc.com/teensy/49-teensy.rules unlock chip using flipIt seems that chip is protected. However, trying to erase and program it did destry data in it (expect bootloader) for some reason, and it seem that dfu-programmer doesn't know how to work with protection features. So, next step is to try atmel's flip under linux but this also doesn't work well.
root@nuc:/nuc/PrintrBot/flip.3.2.1# cat debian-install.sh sudo apt-get install openjdk-9-jre:i386 libusb-0.1-4:i386 root@nuc:/nuc/PrintrBot/flip.3.2.1# cat env.sh export JAVA_HOME=/usr/lib/jvm/java-9-openjdk-i386/ export FLIP_HOME=/nuc/PrintrBot/flip.3.2.1/bin/ root@nuc:/nuc/PrintrBot/flip.3.2.1# cd bin/ root@nuc:/nuc/PrintrBot/flip.3.2.1/bin# cp -apv libatlibusbdfu.so libatlibusbdfu.so.orig root@nuc:/nuc/PrintrBot/flip.3.2.1/bin# sed 's/\/sys\/bus\/usb/\/dev\/bus\/usb/g' libatlibusbdfu.so.orig > libatlibusbdfu.so # run from bin directory or it won't work (?!) root@nuc:/nuc/PrintrBot/flip.3.2.1/bin# ./flip.sh avrdudemade cable to convert 10 pin ICSP on usbasp to 6 pin ICSP on printrboard http://reprap.org/wiki/Printrboard#Bootloaders Pin 1 (not red wire on my harness because of re-wiring) is closest to the SD card slot. root@nuc:/nuc/PrintrBot# avrdude -p usb1286 -c usbasp avrdude: warning: cannot set sck period. please check for usbasp firmware update. avrdude: AVR device initialized and ready to accept instructions Reading | ################################################## | 100% 0.00s avrdude: Device signature = 0x1e9782 (probably usb1287) avrdude: safemode: Fuses OK (E:F3, H:99, L:5E) avrdude done. Thank you. ok, factory bootloader fuses
# disable jtag
avrdude -c usbtiny -p at90usb1286 -U lfuse:w:0xde:m -U hfuse:w:0xdb:m -U efuse:w:0xf0:m
# enabled jtag
avrdude -c usbtiny -p at90usb1286 -U lfuse:w:0xDE:m -U hfuse:w:0x9B:m -U efuse:w:0xF0:m
root@nuc:/nuc/PrintrBot# avrdude -c usbtiny -p at90usb1286 -U lfuse:w:0xde:m -U hfuse:w:0xdb:m -U efuse:w:0xf0:m
avrdude: Error: Could not find USBtiny device (0x1781/0xc9f)
avrdude done. Thank you.
root@nuc:/nuc/PrintrBot# avrdude -c usbasp -p at90usb1286 -U lfuse:w:0xde:m -U hfuse:w:0xdb:m -U efuse:w:0xf0:m
avrdude: warning: cannot set sck period. please check for usbasp firmware update.
avrdude: AVR device initialized and ready to accept instructions
Reading | ################################################## | 100% 0.00s
avrdude: Device signature = 0x1e9782 (probably usb1287)
avrdude: reading input file "0xde"
avrdude: writing lfuse (1 bytes):
Writing | | 0% 0.00s ***failed;
Writing | ################################################## | 100% 0.06s
avrdude: 1 bytes of lfuse written
avrdude: verifying lfuse memory against 0xde:
avrdude: load data lfuse data from input file 0xde:
avrdude: input file 0xde contains 1 bytes
avrdude: reading on-chip lfuse data:
Reading | ################################################## | 100% 0.00s
avrdude: verifying ...
avrdude: verification error, first mismatch at byte 0x0000
0x5e != 0xde
avrdude: verification error; content mismatch
avrdude: safemode: lfuse changed! Was de, and is now 5e
[Tue Apr 17 07:12:19 2018] usb 1-1.4: USB disconnect, device number 20
[Tue Apr 17 07:12:19 2018] usb 1-1.4: USB disconnect, device number 20
Would you like this fuse to be changed back? [y/n]
Would you like this fuse to be changed back? [y/n] n
avrdude: safemode: Fuses OK (E:F3, H:99, L:DE)
avrdude done. Thank you.
root@nuc:/nuc/PrintrBot# avrdude -p usb1286 -c usbasp
avrdude: warning: cannot set sck period. please check for usbasp firmware update.
avrdude: AVR device initialized and ready to accept instructions
Reading | ################################################## | 100% 0.00s
avrdude: Device signature = 0x1e9782 (probably usb1287)
avrdude: safemode: Fuses OK (E:F3, H:99, L:5E)
avrdude done. Thank you.
flash bootloaderhuh, hum, program bootloader anyway from http://blog.lincomatic.com/?p=548 root@nuc:/nuc/PrintrBot# avrdude -p usb1286 -c usbasp -U flash:w:BootloaderDFU.hex power cycle, return jumper re-try programming fuses root@nuc:/nuc/PrintrBot# avrdude -c usbasp -p at90usb1286 -U lfuse:w:0xDE:m -U hfuse:w:0x9B:m -U efuse:w:0xF0:m dfu programming worksre-try dfu programming root@nuc:/nuc/PrintrBot# dfu-programmer at90usb1286 erase root@nuc:/nuc/PrintrBot# dfu-programmer at90usb1286 flash Marlin/.pioenvs/printrboard/firmware.hex Validating... 61322 bytes used (49.90%) avrdude programming
dpavlin@nuc:/nuc/PrintrBot/Marlin$ avrdude -c usbasp -p usb1286 -U flash:w:.pioenvs/printrboard/firmware.hex
avrdude: warning: cannot set sck period. please check for usbasp firmware update.
avrdude: AVR device initialized and ready to accept instructions
Reading | ################################################## | 100% 0.00s
avrdude: Device signature = 0x1e9782 (probably usb1287)
avrdude: NOTE: "flash" memory has been specified, an erase cycle will be performed
To disable this feature, specify the -D option.
avrdude: erasing chip
avrdude: warning: cannot set sck period. please check for usbasp firmware update.
avrdude: reading input file ".pioenvs/printrboard/firmware.hex"
avrdude: input file .pioenvs/printrboard/firmware.hex auto detected as Intel Hex
avrdude: writing flash (87280 bytes):
Writing | ################################################## | 100% 58.04s
avrdude: 87280 bytes of flash written
avrdude: verifying flash memory against .pioenvs/printrboard/firmware.hex:
avrdude: load data flash data from input file .pioenvs/printrboard/firmware.hex:
avrdude: input file .pioenvs/printrboard/firmware.hex auto detected as Intel Hex
avrdude: input file .pioenvs/printrboard/firmware.hex contains 87280 bytes
avrdude: reading on-chip flash data:
Reading | ################################################## | 100% 38.49s
avrdude: verifying ...
avrdude: 87280 bytes of flash verified
avrdude: safemode: Fuses OK (E:F0, H:9B, L:DE)
avrdude done. Thank you.
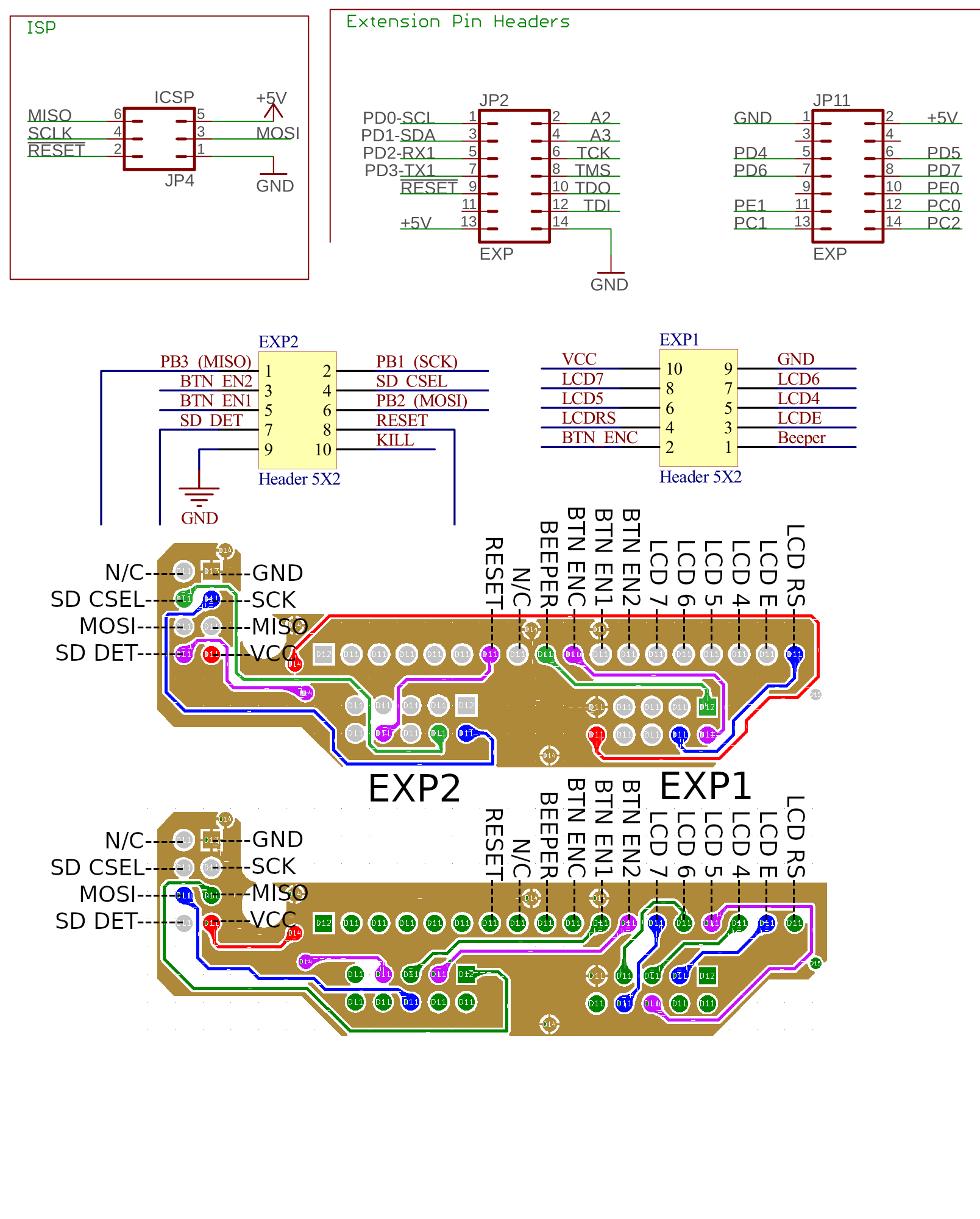
RepRapDiscount Full Graphic Smart Controllerpinoutsprintrboard-lcd-pinout.png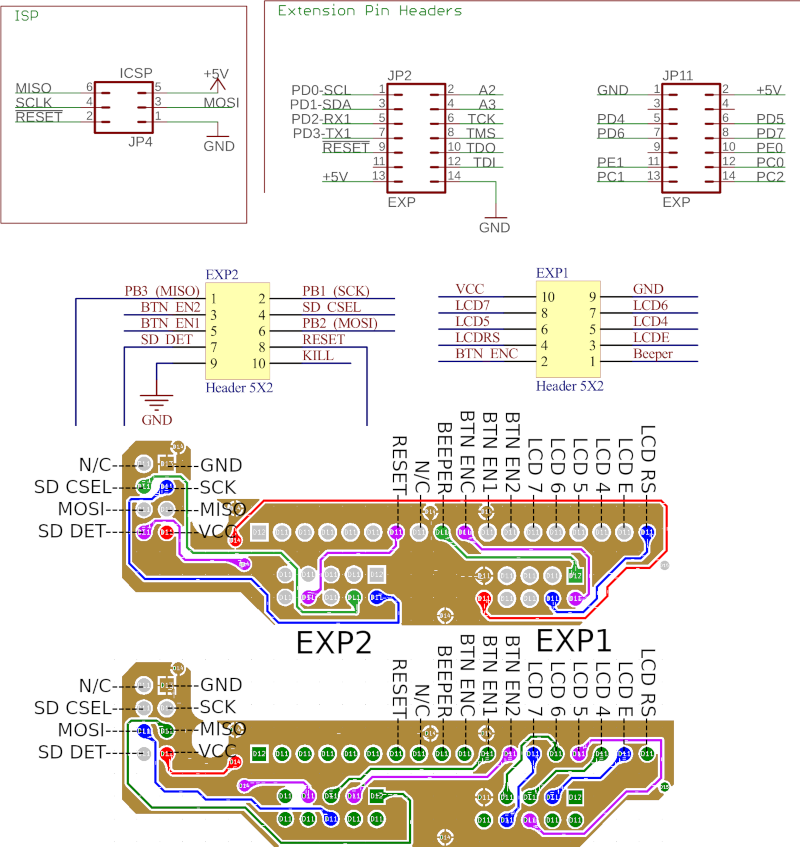 Marlin pinoutdiff --git a/Marlin/pins_PRINTRBOARD.h b/Marlin/pins_PRINTRBOARD.h index 42632d174..8146505a3 100644 --- a/Marlin/pins_PRINTRBOARD.h +++ b/Marlin/pins_PRINTRBOARD.h @@ -166,3 +166,19 @@ #endif #endif // ULTRA_LCD && NEWPANEL + +// XXX dpavlin -- my pinout +#define LCD_PINS_RS 9 // E1 JP11-11 +#define LCD_PINS_ENABLE 8 // E0 JP11-10 +#define LCD_PINS_D4 7 // D7 JP11-8 +#define LCD_PINS_D5 6 // D6 JP11-7 +#define LCD_PINS_D6 5 // D5 JP11-6 +#define LCD_PINS_D7 4 // D4 JP11-5 + +#define BTN_EN1 10 // C0 JP11-12 +#define BTN_EN2 11 // C1 JP11-13 +#define BTN_ENC 12 // C2 JP11-14 + +// display delays are added to +// Marlin/ultralcd_st7920_u8glib_rrd.h + diff --git a/Marlin/ultralcd_st7920_u8glib_rrd.h b/Marlin/ultralcd_st7920_u8glib_rrd.h index db6224e47..8474bef24 100644 --- a/Marlin/ultralcd_st7920_u8glib_rrd.h +++ b/Marlin/ultralcd_st7920_u8glib_rrd.h @@ -49,7 +49,7 @@ #define CPU_ST7920_DELAY_1 DELAY_NS(0) #define CPU_ST7920_DELAY_2 DELAY_NS(0) #define CPU_ST7920_DELAY_3 DELAY_NS(50) -#elif MB(3DRAG) || MB(K8200) || MB(K8400) || MB(SILVER_GATE) +#elif MB(3DRAG) || MB(K8200) || MB(K8400) || MB(SILVER_GATE) || MB(PRINTRBOARD) #define CPU_ST7920_DELAY_1 DELAY_NS(0) #define CPU_ST7920_DELAY_2 DELAY_NS(188) #define CPU_ST7920_DELAY_3 DELAY_NS(0) Hardware upgradeRAMPS1.4 LCD 12864
LM8UU
Y axis coupler
belts and pulleys
Y axes rod
Needs 3d printed adapter for nut to fit: https://www.thingiverse.com/thing:2963508 Nut is friction fit which I consider somewhat as safety feature, if I found problems with it, I will probably add a bit of ABS goo in holes to fix it in place bed levelingself-made sensor from RFID card, paper clip and case intrusion switch, connected in parallel with z-axis switch (it has to be normally closed, so that trigger interrupts signal) BL touch
http://www.geeetech.com/wiki/index.php/3DTouch_Auto_Leveling_Sensor pinout, right to left
Needs additional pin for servo control (S - servo) Marlin configuration
commit 18396a8cd25585d5d562d4345ed851b91fb58821 (HEAD -> PrintrBot_Plus_LC-1.1.9)
Author: Dobrica Pavlinusic <dpavlin@rot13.org>
Date: Sat Sep 8 11:05:54 2018 +0200
probe offset from extruder
diff --git a/Marlin/Configuration.h b/Marlin/Configuration.h
index 438494220..aeed322a7 100644
--- a/Marlin/Configuration.h
+++ b/Marlin/Configuration.h
@@ -770,8 +770,8 @@
* O-- FRONT --+
* (0,0)
*/
-#define X_PROBE_OFFSET_FROM_EXTRUDER 10 // X offset: -left +right [of the nozzle]
-#define Y_PROBE_OFFSET_FROM_EXTRUDER 10 // Y offset: -front +behind [the nozzle]
+#define X_PROBE_OFFSET_FROM_EXTRUDER 35 // X offset: -left +right [of the nozzle]
+#define Y_PROBE_OFFSET_FROM_EXTRUDER 5 // Y offset: -front +behind [the nozzle]
#define Z_PROBE_OFFSET_FROM_EXTRUDER 0 // Z offset: -below +above [the nozzle]
// Certain types of probes need to stay away from edges
commit 2329e561e0f2997e78495c249706e9ce62608293
Author: Dobrica Pavlinusic <dpavlin@rot13.org>
Date: Sat Sep 8 10:51:07 2018 +0200
enable bed leveling
AUTO_BED_LEVELING_UBL doesn't seem to compile for me ATM
diff --git a/Marlin/Configuration.h b/Marlin/Configuration.h
index 38e0c343b..438494220 100644
--- a/Marlin/Configuration.h
+++ b/Marlin/Configuration.h
@@ -969,7 +969,7 @@
*/
//#define AUTO_BED_LEVELING_3POINT
//#define AUTO_BED_LEVELING_LINEAR
-//#define AUTO_BED_LEVELING_BILINEAR
+#define AUTO_BED_LEVELING_BILINEAR
//#define AUTO_BED_LEVELING_UBL
//#define MESH_BED_LEVELING
@@ -1023,6 +1023,8 @@
//#define FRONT_PROBE_BED_POSITION MIN_PROBE_EDGE
//#define BACK_PROBE_BED_POSITION (Y_BED_SIZE - MIN_PROBE_EDGE)
+ #define RIGHT_PROBE_BED_POSITION 190 // dpavlin -- probe overhangs on the right
+
// Probe along the Y axis, advancing X after each column
//#define PROBE_Y_FIRST
commit b867a948cd3b64d69e900b99a1306631d62753df
Author: Dobrica Pavlinusic <dpavlin@rot13.org>
Date: Sun Sep 2 08:40:52 2018 +0200
added bltouch config and pin on e-stop
diff --git a/Marlin/Configuration.h b/Marlin/Configuration.h
index fd8463456..38e0c343b 100644
--- a/Marlin/Configuration.h
+++ b/Marlin/Configuration.h
@@ -721,7 +721,7 @@
/**
* The BLTouch probe uses a Hall effect sensor and emulates a servo.
*/
-//#define BLTOUCH
+#define BLTOUCH
#if ENABLED(BLTOUCH)
//#define BLTOUCH_DELAY 375 // (ms) Enable and increase if needed
#endif
@@ -1909,7 +1909,7 @@
* Set this manually if there are extra servos needing manual control.
* Leave undefined or set to 0 to entirely disable the servo subsystem.
*/
-//#define NUM_SERVOS 3 // Servo index starts with 0 for M280 command
+#define NUM_SERVOS 1 // Servo index starts with 0 for M280 command
// Delay (in milliseconds) before the next move will start, to give the servo time to reach its target angle.
// 300ms is a good value but you can try less delay.
diff --git a/Marlin/pins_PRINTRBOARD.h b/Marlin/pins_PRINTRBOARD.h
index 8146505a3..a68802725 100644
--- a/Marlin/pins_PRINTRBOARD.h
+++ b/Marlin/pins_PRINTRBOARD.h
@@ -182,3 +182,9 @@
// display delays are added to
// Marlin/ultralcd_st7920_u8glib_rrd.h
+// bltouch - use e-stop for servo
+// dpavlin@nuc:/nuc/PrintrBot/Marlin$ grep E5 m43-pins.txt
+// PIN: 37 Port: E5 <unused/unknown> Input = 1
+//
+#define SERVO0_PIN 37 // E5 E-STOP
+
gcode for bl-touchM280 P0 S10 ; pushes the pin down M280 P0 S90 ; pulls the pin up M280 P0 S120 ; Self test – keeps going until you do pin up/down or release alarm M280 P0 S160 ; Release alarm M420 V ; display bed leveling
Bilinear Leveling Grid:
0 1 2
0 +0.445 +0.402 +0.284
1 -0.083 +0.013 +0.023
2 -0.678 -0.432 -0.264
echo:Bed Leveling On
echo:Fade Height Off
Notes for Ender 3 V1.1.3
Compal_LA-6352P_PAZ00_AC100.pdf
Tegra 2 device kernel
cpuinfo$ cat /proc/cpuinfo Processor : ARMv7 Processor rev 0 (v7l) processor : 0 BogoMIPS : 1998.84 Features : swp half thumb fastmult vfp edsp vfpv3 vfpv3d16 CPU implementer : 0x41 CPU architecture: 7 CPU variant : 0x1 CPU part : 0xc09 CPU revision : 0 Hardware : NVIDIA Harmony Development System Revision : 0000 Serial : 0000000000000000 $ cat /proc/meminfo MemTotal: 383348 kB MemFree: 106528 kB Buffers: 30116 kB Cached: 123316 kB SwapCached: 0 kB Active: 164792 kB Inactive: 85020 kB Active(anon): 96692 kB Inactive(anon): 0 kB Active(file): 68100 kB Inactive(file): 85020 kB Unevictable: 0 kB Mlocked: 0 kB SwapTotal: 0 kB SwapFree: 0 kB Dirty: 0 kB Writeback: 0 kB AnonPages: 96412 kB Mapped: 44536 kB Shmem: 312 kB Slab: 8940 kB SReclaimable: 4848 kB SUnreclaim: 4092 kB KernelStack: 2528 kB PageTables: 8324 kB NFS_Unstable: 0 kB Bounce: 0 kB WritebackTmp: 0 kB CommitLimit: 191672 kB Committed_AS: 6569284 kB VmallocTotal: 614400 kB VmallocUsed: 30656 kB VmallocChunk: 520068 kB RootingnvflashPress CTRL + ESC + power button to get into APX mode [Thu Oct 11 06:31:57 2018] usb 2-2.4: new high-speed USB device number 13 using xhci_hcd [Thu Oct 11 06:31:57 2018] usb 2-2.4: New USB device found, idVendor=0955, idProduct=7820, bcdDevice= 1.02 [Thu Oct 11 06:31:57 2018] usb 2-2.4: New USB device strings: Mfr=1, Product=2, SerialNumber=0 [Thu Oct 11 06:31:57 2018] usb 2-2.4: Product: APX [Thu Oct 11 06:31:57 2018] usb 2-2.4: Manufacturer: NVIDIA Corp. In theory. In practice driver package from is everything you need. It's from http://developer.nvidia.com/content/linux-tegra-release-12-alpha-1-released fastboot.stock.bint61p:/home/dpavlin/Downloads/ldk/bootloader/alt# wget https://github.com/muromec/putusb/raw/master/bin/fastboot.stock.bin --2011-09-12 20:40:17-- https://github.com/muromec/putusb/raw/master/bin/fastboot.stock.bin Resolving github.com (github.com)... 207.97.227.239 Connecting to github.com (github.com)|207.97.227.239|:443... connected. HTTP request sent, awaiting response... 302 Found Location: https://raw.github.com/muromec/putusb/master/bin/fastboot.stock.bin [following] --2011-09-12 20:40:19-- https://raw.github.com/muromec/putusb/master/bin/fastboot.stock.bin Resolving raw.github.com (raw.github.com)... 207.97.227.243 Connecting to raw.github.com (raw.github.com)|207.97.227.243|:443... connected. HTTP request sent, awaiting response... 200 OK Length: 936016 (914K) [application/octet-stream] Saving to: `fastboot.stock.bin' 100%[=====================================================>] 936,016 645K/s in 1.4s 2011-09-12 20:40:22 (645 KB/s) - `fastboot.stock.bin' saved [936016/936016] t61p:/home/dpavlin/Downloads/ldk/bootloader/alt# md5sum fastboot.stock.bin 9197365fb42c5801b4124e75ea00512c fastboot.stock.bin backupFollowing instructions at http://gitorious.org/ac100/pages/Installation t61p:/home/dpavlin/Downloads/ldk/bootloader# ./nvflash --bl fastboot.stock.bin --go Nvflash started rcm version 0X20001 System Information: chip name: t20 chip id: 0x20 major: 1 minor: 2 chip sku: 0x8 chip uid: 0x1700618943a00317 macrovision: disabled hdcp: enabled sbk burned: false dk burned: false boot device: emmc operating mode: 3 device config strap: 0 device config fuse: 0 sdram config strap: 0 downloading bootloader -- load address: 0x108000 entry point: 0x108000 sending file: fastboot.stock.bin | 936016/936016 bytes sent fastboot.stock.bin sent successfully waiting for bootloader to initialize bootloader downloaded successfully t61p:/home/dpavlin/Downloads/ldk/bootloader# ./nvflash -r --getpartitiontable partitiontable.txt Nvflash started [resume mode] Succesfully updated partition table information to partitiontable.txt t61p:/home/dpavlin/Downloads/ldk/bootloader# ./nvflash -r --read 2 part-2.img Nvflash started [resume mode] receiving file: part-2.img, expected size: 3145728 bytes / 3145728/3145728 bytes received file received successfully t61p:/home/dpavlin/Downloads/ldk/bootloader# ./nvflash -r --read 3 part-3.img Nvflash started [resume mode] receiving file: part-3.img, expected size: 524288 bytes / 524288/524288 bytes received file received successfully t61p:/home/dpavlin/Downloads/ldk/bootloader# /nvflash -r --read 4 part-4.img bash: /nvflash: No such file or directory t61p:/home/dpavlin/Downloads/ldk/bootloader# ./nvflash -r --read 4 part-4.img Nvflash started [resume mode] receiving file: part-4.img, expected size: 2097152 bytes / 2097152/2097152 bytes received file received successfully t61p:/home/dpavlin/Downloads/ldk/bootloader# ./nvflash -r --read 5 part-5.img Nvflash started [resume mode] receiving file: part-5.img, expected size: 5242880 bytes / 5242880/5242880 bytes received file received successfully t61p:/home/dpavlin/Downloads/ldk/bootloader# ./nvflash -r --read 6 part-6.img Nvflash started [resume mode] receiving file: part-6.img, expected size: 8388608 bytes / 8388608/8388608 bytes received file received successfully t61p:/home/dpavlin/Downloads/ldk/bootloader# ./nvflash -r --read 7 part-7.img Nvflash started [resume mode] receiving file: part-7.img, expected size: 1048576 bytes / 1048576/1048576 bytes received file received successfully t61p:/home/dpavlin/Downloads/ldk/bootloader# ./nvflash -r --read 8 part-8.img Nvflash started [resume mode] receiving file: part-8.img, expected size: 314572800 bytes / 314572800/314572800 bytes received file received successfully t61p:/home/dpavlin/Downloads/ldk/bootloader# ./nvflash -r --read 9 part-9.img Nvflash started [resume mode] receiving file: part-9.img, expected size: 419430400 bytes / 419430400/419430400 bytes received file received successfully t61p:/home/dpavlin/Downloads/ldk/bootloader# ./nvflash -r --read 10 part-10.img Nvflash started [resume mode] receiving file: part-10.img, expected size: 2097152 bytes / 2097152/2097152 bytes received file received successfully t61p:/home/dpavlin/Downloads/ldk/bootloader# ./nvflash -r --read 11 part-11.img Nvflash started [resume mode] receiving file: part-11.img, expected size: 524288 bytes / 524288/524288 bytes received file received successfully t61p:/home/dpavlin/Downloads/ldk/bootloader# ./nvflash -r --read 12 part-12.img Nvflash started [resume mode] receiving file: part-12.img, expected size: 1294991360 bytes / 1294991360/1294991360 bytes received file received successfully t61p:/home/dpavlin/Downloads/ldk/bootloader# ./nvflash -r --read 13 part-13.img Nvflash started [resume mode] receiving file: part-13.img, expected size: 524288 bytes / 524288/524288 bytes received file received successfully t61p:/home/dpavlin/Downloads/ldk/bootloader# ./nvflash -r --read 14 part-14.img Nvflash started [resume mode] receiving file: part-14.img, expected size: 5891424256 bytes / 5891424256/5891424256 bytes received file received successfully Linuxlinks
fetchrss: http://feeds.delicious.com/v2/rss/dpavlin/ac100?count=15
phh 2.6.32 kernel with working suspend and audiot61p:/home/dpavlin/ac100/linux4tegra_10.9.3# LD_LIBRARY_PATH=./nvflash/ ./nvflash/nvflash --bl ./prebuilt/fastboot.stock.bin --read 6 tegra_partition_6.bin --go Nvflash started rcm version 0X20001 System Information: chip name: t20 chip id: 0x20 major: 1 minor: 2 chip sku: 0x8 chip uid: 0x1700618943a00317 macrovision: disabled hdcp: enabled sbk burned: false dk burned: false boot device: emmc operating mode: 3 device config strap: 0 device config fuse: 0 sdram config strap: 0 downloading bootloader -- load address: 0x108000 entry point: 0x108000 sending file: ./prebuilt/fastboot.stock.bin | 936016/936016 bytes sent ./prebuilt/fastboot.stock.bin sent successfully waiting for bootloader to initialize bootloader downloaded successfully receiving file: tegra_partition_6.bin, expected size: 8388608 bytes / 8388608/8388608 bytes received file received successfully t61p:/home/dpavlin/ac100/linux4tegra_10.9.3# LD_LIBRARY_PATH=./nvflash/ ./nvflash/nvflash --wait --bl ./prebuilt/fastboot.stock.bin --download 6 ../32.boot.menu.v1.img --go Nvflash started rcm version 0X20001 System Information: chip name: t20 chip id: 0x20 major: 1 minor: 2 chip sku: 0x8 chip uid: 0x1700618943a00317 macrovision: disabled hdcp: enabled sbk burned: false dk burned: false boot device: emmc operating mode: 3 device config strap: 0 device config fuse: 0 sdram config strap: 0 downloading bootloader -- load address: 0x108000 entry point: 0x108000 sending file: ./prebuilt/fastboot.stock.bin | 936016/936016 bytes sent ./prebuilt/fastboot.stock.bin sent successfully waiting for bootloader to initialize bootloader downloaded successfully sending file: ../32.boot.menu.v1.img / 8388608/8388608 bytes sent ../32.boot.menu.v1.img sent successfully mainline kernel
u-boot from APX
This should allow you to send u-boot, kernel and initramfs to any tegra2 board which can be in APX mode without build u-bootdpavlin@klin:/klin/u-boot$ cat env.sh export CROSS_COMPILE="arm-none-eabi-" ARCH=arm dpavlin@klin:/klin/u-boot$ . env.sh dpavlin@klin:/klin/u-boot$ make paz00_defconfig make build kerneldpavlin@klin:/klin/Tegra/linux$ git remote -v origin https://github.com/grate-driver/linux (fetch) origin https://github.com/grate-driver/linux (push) samsung-tab-10.1 https://github.com/Decatf/linux (fetch) samsung-tab-10.1 https://github.com/Decatf/linux (push) dpavlin@klin:/klin/Tegra/linux$ git branch -vv * master 63a6317580f8 [origin/master] ARM: tegra: Clear EMC interrupts on resume from LP1 on Tegra30+ dpavlin@klin:/klin/Tegra/linux$ cat /klin/u-boot/env.sh export CROSS_COMPILE="arm-none-eabi-" ARCH=arm dpavlin@klin:/klin/Tegra/linux$ . /klin/u-boot/env.sh dpavlin@klin:/klin/Tegra/linux$ make tegra_defconfig make create initrd with new modulesdpavlin@klin:/klin/Tegra/linux$ cat tegra-ramdisk.sh #!/bin/sh -xe test -d initrd && rm -Rf initrd mkdir initrd cd initrd gzip -cd /tmp/initrd.img | fakeroot -- cpio -i -d -H newc --no-absolute-filenames rm -R lib/modules/* cd .. make modules_install INSTALL_MOD_PATH=initrd/ INSTALL_MOD_STRIP=1 cd initrd find . | cpio -o -R 0:0 -H newc > ../initrd.new.cpio cd .. gzip -f -6 initrd.new.cpio /klin/u-boot/tools/mkimage -A arm -O linux -T ramdisk -C gzip -n uInitrd -d initrd.new.cpio.gz uInitrd.new run it to create initrd: dpavlin@klin:/klin/Tegra/linux$ ./tegra-ramdisk.sh Image Name: uInitrd Created: Fri Oct 12 11:20:42 2018 Image Type: ARM Linux RAMDisk Image (gzip compressed) Data Size: 4082917 Bytes = 3987.22 KiB = 3.89 MiB Load Address: 00000000 Entry Point: 00000000 create bootloader filelatest version seems to be: https://gitlab.com/uboot-ac100/create_bootimage.git dpavlin@nuc:/nuc/Tegra/ac100/create_bootimage/example$ ../create_image.pl /mnt/klin/klin/u-boot/u-boot-dtb-tegra.bin /m nt/klin/klin/Tegra/linux/arch/arm/boot/zImage /tmp/postmarketOS-export/initrd.img /mnt/klin/klin/Tegra/linux/arch/arm/b oot/dts/tegra20-paz00.dtb uboot.scr boot.img Creating boot image for tegrarcm ... ./tmp_uboot.scr image layout: section loadaddr size ================================= uboot : 0x108000 505627 kernel : 0x190000 6485800 initrd : 0x7c0000 4082981 fdt : 0xbb0000 29659 script : 0xbc0000 226 image written to boot.img Now press CTRL + ESC + power on to enter APX mode dpavlin@nuc:/nuc/Tegra/ac100/create_bootimage/example$ sudo apt-get install libcrypto++6 dpavlin@nuc:/nuc/Tegra/ac100/create_bootimage/example$ /mnt/klin/klin/Tegra/tegrarcm/src/tegrarcm --bct paz00-micron-toshiba-8g.bct --bootloader boot.img --loadaddr 0x108000 bct file: paz00-micron-toshiba-8g.bct bootloader file: boot.img load addr 0x108000 entry addr 0x108000 device id: 0x7820 uid: 0x1700618943a00317 RCM version: 2.1 downloading miniloader to target at address 0x40008000 (132976 bytes)... miniloader downloaded successfully Chip UID: 0x00000000000000001700618943a00317 Chip ID: 0x20 Chip ID Major Version: 0x1 Chip ID Minor Version: 0x2 Chip SKU: 0x8 (t20) Boot ROM Version: 0x1 Boot Device: 0x2 (EMMC) Operating Mode: 0x3 (developer mode) Device Config Strap: 0x0 Device Config Fuse: 0x0 SDRAM Config Strap: 0x0 sending file: paz00-micron-toshiba-8g.bct - 4080/4080 bytes sent paz00-micron-toshiba-8g.bct sent successfully sending file: boot.img - 11239650/11239650 bytes sent boot.img sent successfully u-boot loads detects initrd (it's small enough thanks to MODULES_STRIP to be detected without CRC errors) but no output from kernel. https://archlinuxarm.org/forum/viewtopic.php?f=23&t=10044&p=51142&hilit=ac100#p51142 suggests CONFIG_TEGRA_DEBUG_UARTA instead of CONFIG_TEGRA_DEBUG_UART_AUTO_ODMDATA but it doesn't work for me. dpavlin@klin:/klin/Tegra/linux$ grep 'TEGRA.*UART' .config # CONFIG_TEGRA_DEBUG_UART_AUTO_ODMDATA is not set CONFIG_TEGRA_DEBUG_UARTA=y # CONFIG_TEGRA_DEBUG_UARTB is not set # CONFIG_TEGRA_DEBUG_UARTC is not set # CONFIG_TEGRA_DEBUG_UARTD is not set # CONFIG_TEGRA_DEBUG_UARTE is not set CONFIG_DEBUG_TEGRA_UART=y serial porthttps://ac100.grandou.net/serial_port_modification  The serial port is the JP1 connector, near the left speaker connector. Pinout, from right to left:
I decided to solder GND to outer pin of connector to the right of pin 1 as opposed to other side of connector.
After that, a peace of capton tape was put over solder connectors to somewhat re-enforce them and provide insulation Serial is 3.3V, 115200 8n1. Output is: dpavlin@nuc:/nuc/Tegra$ microcom -p /dev/ttyUSB2 connected to /dev/ttyUSB2 Escape character: Ctrl-\ Type the escape character to get to the prompt. U-Boot SPL 2018.11-rc1-00130-g0a60a81ba3 (Oct 12 2018 - 11:18:01 +0200) Trying to boot from RAM U-Boot 2018.11-rc1-00130-g0a60a81ba3 (Oct 12 2018 - 11:18:01 +0200) TEGRA20 Model: Toshiba AC100 / Dynabook AZ Board: Compal Paz00 DRAM: 512 MiB MMC: sdhci@c8000000: 1, sdhci@c8000600: 0 Loading Environment from MMC... *** Warning - bad CRC, using default environment In: serial Out: vidconsole Err: vidconsole Net: No ethernet found. Hit any key to stop autoboot: 0 ## Executing script at 00b30000 ## Loading init Ramdisk from Legacy Image at 00700000 ... Image Name: uInitrd Image Type: ARM Linux RAMDisk Image (gzip compressed) Data Size: 4269789 Bytes = 4.1 MiB Load Address: 00000000 Entry Point: 00000000 Verifying Checksum ... OK ## Flattened Device Tree blob at 00b20000 Booting using the fdt blob at 0xb20000 Using Device Tree in place at 00b20000, end 00b2a3da Starting kernel ... Error: invalid dtb and unrecognized/unsupported machine ID r1=0x00000c38, r2=0x00000000 Available machine support: ID (hex) NAME ffffffff Generic DT based system ffffffff NVIDIA Tegra SoC (Flattened Device Tree) Please check your kernel config and/or bootloader. According to http://billauer.co.il/blog/2014/02/uboot-linux-dtb-fdt-device-tree/ this means that kernel didn't found valid device tree and tries to detect board usin machine ID registrars.
Solution for this seems to use u-boot variables for loading kernel, ramfs and dtb as opposed to values which script creates,
fatload usb 0:1 ${kernel_addr_r} /boot/zImage
fatload usb 0:1 ${fdt_addr_r} /boot/tegra20-paz00.dtb
fatload usb 0:1 ${ramdisk_addr_r} /boot/uInitrd.new
bootz ${kernel_addr_r} ${ramdisk_addr_r} ${fdt_addr_r}
Here are also known working addresses which u-boot uses:
Tegra20 (Paz00) MOD # echo ${kernel_addr_r}
0x01000000
Tegra20 (Paz00) MOD # echo ${fdt_addr_r}
0x02000000
Tegra20 (Paz00) MOD # echo ${ramdisk_addr_r}
0x02100000
so much higher in memory map than create_image script. However, u-boot seems to want to load at 0x108000 so it's inpractical bootstrap debianbased on https://wiki.debian.org/InstallingDebianOn/Toshiba/AC100
dpavlin@nuc:/mnt$ sudo debootstrap --foreign --arch=armhf stretch sdd1 http://ftp.hr.debian.org/debian
dpavlin@nuc:/mnt$ df sdd1/
Filesystem 1K-blocks Used Available Use% Mounted on
/dev/sdd1 1021948 169056 784596 18% /mnt/sdd1
dpavlin@nuc:/mnt$ sudo cp /usr/bin/qemu-arm-static sdd1/usr/bin
dpavlin@nuc:/mnt$ sudo chroot sdd1 /debootstrap/debootstrap --second-stage
dpavlin@nuc:/mnt$ cd sdd1/
dpavlin@nuc:/mnt/sdd1$ sudo mount --bind /sys sys
dpavlin@nuc:/mnt/sdd1$ sudo mount --bind /dev dev
dpavlin@nuc:/mnt/sdd1$ sudo mount --bind /proc proc
dpavlin@nuc:/mnt/sdd1$ sudo chroot .
root@nuc:/# apt-get install u-boot-tools
root@ac100:/boot# cat boot.cmd
ext2load usb 0:1 ${kernel_addr_r} /boot/zImage
ext2load usb 0:1 ${fdt_addr_r} /boot/tegra20-paz00.dtb
ext2load usb 0:1 ${ramdisk_addr_r} /boot/uInitrd
setenv bootargs root=/dev/sda1 rootwait CMA=64M tegrapart=recovery:300:a00:800,boot:d00:1000:800,mbr:1d00:200:800
bootz ${kernel_addr_r} ${ramdisk_addr_r} ${fdt_addr_r}
# mkimage -C none -A arm -T script -d /boot/boot.cmd /boot/boot.scr
u-boot over pax, usb filesystemdpavlin@nuc:/nuc/Tegra/ac100/create_bootimage/example$ /mnt/klin/klin/Tegra/tegrarcm/src/tegrarcm --bct paz00-micron-toshiba-8g.bct --bootloader /mnt/klin/klin/Tegra/u-boot-tegra/u-boot-dtb-tegra.bin --loadaddr 0x108000 bct file: paz00-micron-toshiba-8g.bct Serial output:
U-Boot SPL 2018.09-rc2-38340-g3d186cf3f3 (Oct 20 2018 - 10:46:53 +0200)
Trying to boot from RAM
U-Boot 2018.09-rc2-38340-g3d186cf3f3 (Oct 20 2018 - 10:46:53 +0200)
TEGRA20
Model: Toshiba AC100 / Dynabook AZ
Board: Compal Paz00
DRAM: 512 MiB
MMC: sdhci@c8000000: 1, sdhci@c8000600: 0
Loading Environment from MMC... OK
In: serial
Out: vidconsole
Err: vidconsole
Net: No ethernet found.
starting USB...
USB0: USB EHCI 1.00
USB1: No code to set up ULPI controller, please enableCONFIG_USB_ULPI and CONFIG_USB_ULPI_VIEWPORTprobe failed, error -38
USB2: USB EHCI 1.00
scanning bus 0 for devices... 1 USB Device(s) found
scanning bus 2 for devices... 4 USB Device(s) found
scanning usb for storage devices... 1 Storage Device(s) found
Hit any key to stop autoboot: 0
Tegra20 (Paz00) MOD # run usb_boot
wifi
root@ac100:/etc/network/interfaces.d# apt-get install firmware-ralink wpasupplicant
root@ac100:/etc/network/interfaces.d# cat wlx6c626d1788b3
allow-hotplug wlx6c626d1788b3
iface wlx6c626d1788b3 inet dhcp
wpa-ssid dreamhouse
wpa-psk xxxxxxxx
disk speedroot@ac100:~# hdparm -tT /dev/sda /dev/mmcblk1 /dev/sda: Timing cached reads: 560 MB in 2.01 seconds = 279.14 MB/sec Timing buffered disk reads: 32 MB in 3.07 seconds = 10.43 MB/sec /dev/mmcblk1: Timing cached reads: 598 MB in 2.00 seconds = 298.86 MB/sec Timing buffered disk reads: 108 MB in 3.01 seconds = 35.83 MB/sec tuhing block sizeroot@ac100:/home/dpavlin/flashbench# ./flashbench -a /dev/mmcblk1 --blocksize=1024 align 2147483648 pre 727µs on 1.07ms post 784µs diff 316µs align 1073741824 pre 833µs on 1.13ms post 789µs diff 320µs align 536870912 pre 798µs on 1.13ms post 825µs diff 317µs align 268435456 pre 816µs on 1.15ms post 795µs diff 342µs align 134217728 pre 742µs on 1.12ms post 843µs diff 327µs align 67108864 pre 669µs on 987µs post 701µs diff 303µs align 33554432 pre 662µs on 1.04ms post 643µs diff 385µs align 16777216 pre 837µs on 1.09ms post 864µs diff 242µs align 8388608 pre 800µs on 1.1ms post 881µs diff 262µs align 4194304 pre 812µs on 1.07ms post 838µs diff 246µs align 2097152 pre 807µs on 1.07ms post 808µs diff 258µs align 1048576 pre 832µs on 960µs post 838µs diff 125µs align 524288 pre 833µs on 959µs post 838µs diff 124µs align 262144 pre 833µs on 959µs post 838µs diff 124µs align 131072 pre 833µs on 962µs post 840µs diff 126µs align 65536 pre 825µs on 951µs post 838µs diff 120µs align 32768 pre 826µs on 956µs post 825µs diff 130µs align 16384 pre 812µs on 924µs post 824µs diff 106µs align 8192 pre 809µs on 841µs post 808µs diff 32.4µs align 4096 pre 808µs on 836µs post 808µs diff 27.7µs align 2048 pre 808µs on 836µs post 809µs diff 27.6µs 8192 seems good, re-test root@ac100:/home/dpavlin/flashbench# ./flashbench -a /dev/mmcblk1 --blocksize=4096 align 2147483648 pre 696µs on 1.04ms post 725µs diff 331µs align 1073741824 pre 917µs on 1.18ms post 870µs diff 289µs align 536870912 pre 880µs on 1.18ms post 907µs diff 291µs align 268435456 pre 899µs on 1.2ms post 877µs diff 311µs align 134217728 pre 825µs on 1.18ms post 927µs diff 300µs align 67108864 pre 864µs on 1.11ms post 842µs diff 253µs align 33554432 pre 914µs on 1.12ms post 897µs diff 212µs align 16777216 pre 921µs on 1.14ms post 948µs diff 210µs align 8388608 pre 884µs on 1.15ms post 965µs diff 229µs align 4194304 pre 895µs on 1.12ms post 922µs diff 215µs align 2097152 pre 890µs on 1.12ms post 890µs diff 227µs align 1048576 pre 916µs on 1.01ms post 922µs diff 89.7µs align 524288 pre 916µs on 1.01ms post 922µs diff 90µs align 262144 pre 916µs on 1.01ms post 923µs diff 89.1µs align 131072 pre 916µs on 1.01ms post 924µs diff 91.1µs align 65536 pre 908µs on 1ms post 921µs diff 85.9µs align 32768 pre 911µs on 1.01ms post 908µs diff 96.2µs align 16384 pre 895µs on 973µs post 908µs diff 71.4µs align 8192 pre 892µs on 896µs post 892µs diff 4.57µs create filesystem
root@ac100:/home/dpavlin/flashbench# mkfs -t ext4 -v -b 4096 -E stride=2,stripe-width=2 /dev/mmcblk1p6
cp -ax ....
root@ac100:~# mount /dev/mmcblk1p1 /tmp/1/
root@ac100:~# cat /tmp/1/boot/boot.cmd
ext2load mmc 0:6 ${kernel_addr_r} /boot/zImage
ext2load mmc 0:6 ${fdt_addr_r} /boot/tegra20-paz00.dtb
ext2load mmc 0:6 ${ramdisk_addr_r} /boot/uInitrd
setenv bootargs root=/dev/mmcblk1p6 rootwait CMA=64M tegrapart=recovery:300:a00:800,boot:d00:1000:800,mbr:1d00:200:800
bootz ${kernel_addr_r} ${ramdisk_addr_r} ${fdt_addr_r}
# mkimage -C none -A arm -T script -d boot.cmd boot.scr
flash u-boot to mmcbased on https://paz00.ru/index.php?title=Flashing_Uboot_to_MMC&setlang=en tegrarcm to get bctdpavlin@nuc:/nuc/Tegra$ git clone https://github.com/NVIDIA/tegrarcm dpavlin@nuc:/nuc/Tegra$ cd tegrarcm/ dpavlin@nuc:/nuc/Tegra/tegrarcm$ sudo apt-get install libcrypto++-dev dpavlin@nuc:/nuc/Tegra/tegrarcm$ ./autogen.sh dpavlin@nuc:/nuc/Tegra/tegrarcm$ make dpavlin@nuc:/nuc/Tegra/tegrarcm$ ./src/tegrarcm --version tegrarcm 1.8 create boot imagedpavlin@nuc:/nuc/Tegra/cbootimage$ git remote -v origin https://github.com/NVIDIA/cbootimage (fetch) origin https://github.com/NVIDIA/cbootimage (push) dpavlin@nuc:/nuc/Tegra/cbootimage$ ./autogen.sh dpavlin@nuc:/nuc/Tegra/cbootimage$ make dpavlin@nuc:/nuc/Tegra/cbootimage$ cat > u-boot.cfg Version = 0x00020001; Bctcopy = 1; Bctfile = ac100.bct; BootLoader = u-boot.bin,0x00108000,0x00108000,Complete; dpavlin@nuc:/nuc/Tegra/cbootimage$ cp ../ac100/create_bootimage/example/ac100-dpavlin.bct ac100.bct dpavlin@nuc:/nuc/Tegra/cbootimage$ cp /mnt/klin/klin/Tegra/u-boot-tegra/u-boot-tegra.bin u-boot.bin dpavlin@nuc:/nuc/Tegra/cbootimage$ ./src/cbootimage -d u-boot.cfg ac100.bct.new bct size: 4080 **update_bl() begin_update(): bct data: b=14 p=9 writing bootloader redundancy = 1 BL[0]: 131073 0001 0000 518563 0x00108000 0x00108000 8e52c9639cb433e9e1e369cf718595c5 BL[1]: 131073 0002 0000 302746 0x00108000 0x00108000 a9014f31e7ccafab319512de6bc48f81 **BL[2]: 0 0000 0000 0000 0x00000000 0x00000000 00000000000000000000000000000000 **BL[3]: 0 0000 0000 0000 0x00000000 0x00000000 00000000000000000000000000000000 Image file ac100.bct.new has been successfully generated! dpavlin@nuc:/nuc/Tegra/cbootimage$ scp ac100.bct.new ac100: dpavlin@nuc:/nuc/Tegra/cbootimage$ ssh root@ac100 # flash new boot image on ac100 root@ac100:~# echo 0 > /sys/block/mmcblk1boot0/force_ro root@ac100:~# dd if=/home/dpavlin/ac100.bct.new of=/dev/mmcblk1boot0 1045+0 records in 1045+0 records out 535040 bytes (535 kB, 522 KiB) copied, 0.135589 s, 3.9 MB/s root@ac100:~# echo 1 > /sys/block/mmcblk1boot0/force_ro create bct backup dpavlin@ac100:~$ sudo dd if=/dev/mmcblk1boot0 of=ac100-dpavlin-0.bct bs=4080 count=1 [sudo] password for dpavlin: 1+0 records in 1+0 records out 4080 bytes (4.1 kB, 4.0 KiB) copied, 0.0018642 s, 2.2 MB/s dpavlin@ac100:~$ sudo dd if=/dev/mmcblk1boot1 of=ac100-dpavlin-1.bct bs=4080 count=1 1+0 records in 1+0 records out 4080 bytes (4.1 kB, 4.0 KiB) copied, 0.0019622 s, 2.1 MB/s in my case, first bct doesn't have OdmData, while 2nd does: dpavlin@nuc:/nuc/Tegra$ grep Odm 0 1 0:OdmData = 0x00000000; 1:OdmData = 0x800c0075; i2c
root@ac100:~# i2cdetect -y -r 0
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- UU --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 4f
50: 50 51 52 53 54 55 56 57 -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
root@ac100:~# i2cdetect -y -r 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
root@ac100:~# i2cdetect -y -r 2
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- UU -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- UU -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
open source support
dpavlin@klin:/klin/FPGA$ sudo apt-get install cargo
dpavlin@klin:/klin/FPGA$ git clone https://github.com/azonenberg/openfpga
dpavlin@klin:/klin/FPGA$ cd openfpga/src/xc2par/
dpavlin@klin:/klin/FPGA/openfpga/src/xc2par$ cargo build --release
dpavlin@klin:/klin/FPGA/openfpga/src/xc2par$ cargo install --root /usr/local
warning: Using `cargo install` to install the binaries for the project in current working directory is deprecated, use `cargo install --path .` instead. Use `cargo build` if you want to simply build the package.
Installing xc2par v0.0.2 (/klin/FPGA/openfpga/src/xc2par)
Finished release [optimized] target(s) in 0.07s
Installing /usr/local/bin/yosys-json-to-intermed-json
Installing /usr/local/bin/inputgraph-json-par
Installing /usr/local/bin/intermed-json-to-inputgraph-json
Installing /usr/local/bin/demo-driver
Installing /usr/local/bin/xc2par
dpavlin@klin:/klin/FPGA$ yosys -p "synth_coolrunner2 -json blinky.json" blinky.v
dpavlin@klin:/klin/FPGA$ xc2par -p xc2c32a-4-vq44 blinky.json
dpavlin@klin:/klin/FPGA$ ls -al blinky.jed
-rw-r--r-- 1 dpavlin dpavlin 15870 Nov 5 14:33 blinky.jed
dpavlin@klin:/klin/FPGA$ git clone https://github.com/azonenberg/jtaghal-cmake
dpavlin@klin:/klin/FPGA$ cd jtaghal-cmake/
dpavlin@klin:/klin/FPGA/jtaghal-cmake$ git submodule init
dpavlin@klin:/klin/FPGA/jtaghal-cmake$ git submodule update
dpavlin@klin:/klin/FPGA/jtaghal-cmake$ mkdir build
dpavlin@klin:/klin/FPGA/jtaghal-cmake$ cd build/
dpavlin@klin:/klin/FPGA/jtaghal-cmake/build$ sudo apt-get install libprotobuf-dev protobuf-compiler libedit-dev
dpavlin@klin:/klin/FPGA/jtaghal-cmake/build$ cmake ..
dpavlin@klin:/klin/FPGA/jtaghal-cmake/build$ make
boardsI have two CoolRunner-II boards from Dangerous Prototypes: XC2C32A Bus Blaster
XC95144XL breakout boardESP8266 based H801 LED Wifi Controller dpavlin@nuc:/nuc/esptool$ wget https://github.com/arendst/Sonoff-Tasmota/releases/download/v6.2.1/sonoff-sensors.bin pi@rpi2 /nuc/esptool $ ./esptool.py --port /dev/ttyUSB2 write_flash -fs 1MB -fm dout 0x0 ./sonoff-sensors.bin esptool.py v2.3-dev Connecting.... Detecting chip type... ESP8266 Chip is ESP8266EX Uploading stub... Running stub... Stub running... Configuring flash size... Compressed 506336 bytes to 345467... Wrote 506336 bytes (345467 compressed) at 0x00000000 in 31.6 seconds (effective 128.3 kbit/s)... Hash of data verified. Leaving... Hard resetting via RTS pin... Now turn off board, remove jumper and blindly type in terminal module 20 This didn't work for me, so I opened new wifi network on Android phone and configured wifi there.   Some of those serial dongles (I have one which is intended for esp01) have been configured for 5V operation instead of 3.3V.
You can check that by measuring RX and TX while plugged in in USB and if they are more than 3.3V your dongle is not really LANdpavlin@x200:/rest/cvs$ git clone https://github.com/RoGeorge/DS1054Z_screen_capture Cloning into 'DS1054Z_screen_capture'... remote: Counting objects: 77, done. remote: Total 77 (delta 0), reused 0 (delta 0), pack-reused 77 Unpacking objects: 100% (77/77), done. Checking connectivity... done. dpavlin@x200:/rest/cvs$ cd DS1054Z_screen_capture/ dpavlin@x200:/rest/cvs/DS1054Z_screen_capture$ dpavlin@x200:/rest/cvs/DS1054Z_screen_capture$ python OscScreenGrabLAN.py png 192.168.3.250 Instrument ID: RIGOL TECHNOLOGIES,DS1104Z,DS1ZA172114616,00.04.03.SP2 Receiving screen capture... Saved file: DS1104Z_DS1ZA172114616_2015-12-31_14.11.17.png dpavlin@x200:/rest/cvs$ git clone https://github.com/pklaus/ds1054z Cloning into 'ds1054z'... remote: Counting objects: 693, done. remote: Total 693 (delta 0), reused 0 (delta 0), pack-reused 693 Receiving objects: 100% (693/693), 136.88 KiB | 0 bytes/s, done. Resolving deltas: 100% (340/340), done. Checking connectivity... done. dpavlin@x200:/rest/cvs$ cd ds1054z/ dpavlin@x200:/rest/cvs/ds1054z$ sudo python setup.py install dpavlin@x200:/rest/cvs/ds1054z$ sudo apt-get install python-zeroconf dpavlin@x200:/rest/cvs/ds1054z$ ds1054z discover 192.168.3.250 dpavlin@x200:/rest/cvs/ds1054z$ ds1054z info Vendor: RIGOL TECHNOLOGIES Product: DS1104Z Serial: DS1ZA172114___ Firmware: 00.04.03.SP2 dpavlin@x200:/rest/cvs/ds1054z$ ds1054z save-screen ds1054z-scope-display_2015-12-31_14-19-52.png VISAUSBfirmware update
dpavlin@x200:/tmp$ unzip -t DS1000Z\(ARM\)Update_00.04.03.02.03.zip
Archive: DS1000Z(ARM)Update_00.04.03.02.03.zip
testing: DS1000Z(ARM)Update_00.04.03.02.03/ OK
testing: DS1000Z(ARM)Update_00.04.03.02.03/DS1000ZUpdate.GEL OK
No errors detected in compressed data of DS1000Z(ARM)Update_00.04.03.02.03.zip.
hints
plugins for firmwarehttps://www.eevblog.com/forum/testgear/rigol-ds1000z-firmware-patch-plugins/ Schematics and service manual for i9250: Samsung_i9250_schem_sm.rar 127|root@maguro:/ # cat /proc/cpuinfo Processor : ARMv7 Processor rev 10 (v7l) processor : 0 BogoMIPS : 1194.24 processor : 1 BogoMIPS : 1194.24 Features : swp half thumb fastmult vfp edsp thumbee neon vfpv3 CPU implementer : 0x41 CPU architecture: 7 CPU variant : 0x2 CPU part : 0xc09 CPU revision : 10 Hardware : Tuna Revision : 0009 Serial : 014994b30201c013 BLEGSM modem over serial portHID keyboardUnlegacy AndroidASOP for OMAP4 devices: https://forum.xda-developers.com/galaxy-nexus/development/rom-omap4-aosp-project-t3334574 https://github.com/Unlegacy-Android/ kernelhttps://github.com/Unlegacy-Android/android_kernel_samsung_tuna dpavlin@klin:/virtual/android/galaxy-nexus$ git clone https://android.googlesource.com/platform/prebuilts/gcc/linux-x86/arm/arm-eabi-4.8/ dpavlin@klin:/virtual/android/galaxy-nexus/omap$ git checkout -b asop-7.1 unlegacy/aosp-7.1 dpavlin@klin:/virtual/android/galaxy-nexus/omap$ make tuna_defconfig ARCH=arm dpavlin@klin:/virtual/android/galaxy-nexus/omap$ cp include/linux/compiler-gcc4.h include/linux/compiler-gcc5.h dpavlin@klin:/virtual/android/galaxy-nexus/omap$ make -j9 ARCH=arm CROSS_COMPILE=arm-none-eabi- OMAP4 USB bootSomewhat interesting things that I can take a look at some time in the future:
To compile it needs following change:
dpavlin@nuc:/nuc/Galaxy-Nexus-i9250/usbboot-omap4$ git diff
diff --git a/Makefile b/Makefile
index 2d10c73..9ea9461 100644
--- a/Makefile
+++ b/Makefile
@@ -38,7 +38,7 @@ BINDIR ?= $(DESTDIR)/usr/bin
DATADIR ?= $(DESTDIR)/usr/share/usbboot
DOCDIR ?= $(DESTDIR)/usr/share/doc/usbboot
-BOARD ?= panda
+BOARD ?= tuna
TARGET_CC := $(TOOLCHAIN)gcc
TARGET_LD := $(TOOLCHAIN)ld
diff --git a/tools/usb-linux.c b/tools/usb-linux.c
index e3492a1..09c40de 100755
--- a/tools/usb-linux.c
+++ b/tools/usb-linux.c
@@ -10,7 +10,7 @@ int linux_usb_init(void)
r = libusb_init(&ctx);
if (r != 0)
return r;
- libusb_set_debug(ctx,0x1);
+ //libusb_set_debug(ctx,0x1);
return 0;
}
Odinserial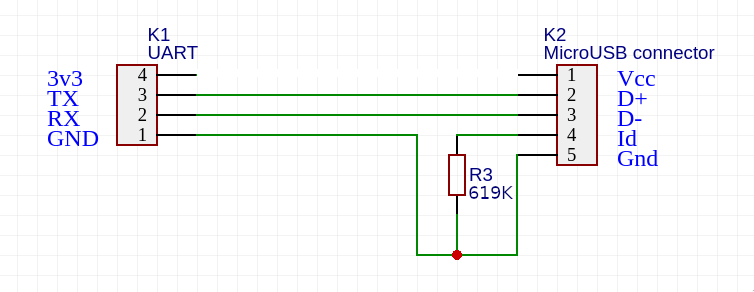
It seems that other suggestion is 150k from https://redmine.replicant.us/projects/replicant/wiki/SamsungSerial - I will have to test which value works UART modes
RID_USB_OTG_MODE, /* 0 0 0 0 0 GND USB OTG Mode */ RID_AUD_SEND_END_BTN, /* 0 0 0 0 1 2K Audio Send_End Button*/ RID_AUD_REMOTE_S1_BTN, /* 0 0 0 1 0 2.604K Audio Remote S1 Button */ RID_AUD_REMOTE_S2_BTN, /* 0 0 0 1 1 3.208K Audio Remote S2 Button */ RID_AUD_REMOTE_S3_BTN, /* 0 0 1 0 0 4.014K Audio Remote S3 Button */ RID_AUD_REMOTE_S4_BTN, /* 0 0 1 0 1 4.82K Audio Remote S4 Button */ RID_AUD_REMOTE_S5_BTN, /* 0 0 1 1 0 6.03K Audio Remote S5 Button */ RID_AUD_REMOTE_S6_BTN, /* 0 0 1 1 1 8.03K Audio Remote S6 Button */ RID_AUD_REMOTE_S7_BTN, /* 0 1 0 0 0 10.03K Audio Remote S7 Button */ RID_AUD_REMOTE_S8_BTN, /* 0 1 0 0 1 12.03K Audio Remote S8 Button */ RID_AUD_REMOTE_S9_BTN, /* 0 1 0 1 0 14.46K Audio Remote S9 Button */ RID_AUD_REMOTE_S10_BTN, /* 0 1 0 1 1 17.26K Audio Remote S10 Button */ RID_AUD_REMOTE_S11_BTN, /* 0 1 1 0 0 20.5K Audio Remote S11 Button */ RID_AUD_REMOTE_S12_BTN, /* 0 1 1 0 1 24.07K Audio Remote S12 Button */ RID_RESERVED_1, /* 0 1 1 1 0 28.7K Reserved Accessory #1 */ RID_RESERVED_2, /* 0 1 1 1 1 34K Reserved Accessory #2 */ RID_RESERVED_3, /* 1 0 0 0 0 40.2K Reserved Accessory #3 */ RID_RESERVED_4, /* 1 0 0 0 1 49.9K Reserved Accessory #4 */ RID_RESERVED_5, /* 1 0 0 1 0 64.9K Reserved Accessory #5 */ RID_AUD_DEV_TY_2, /* 1 0 0 1 1 80.07K Audio Device Type 2 */ RID_PHONE_PWD_DEV, /* 1 0 1 0 0 102K Phone Powered Device */ RID_TTY_CONVERTER, /* 1 0 1 0 1 121K TTY Converter */ RID_UART_CABLE, /* 1 0 1 1 0 150K UART Cable */ RID_CEA936A_TY_1, /* 1 0 1 1 1 200K CEA936A Type-1 Charger(1) */ RID_FM_BOOT_OFF_USB, /* 1 1 0 0 0 255K Factory Mode Boot OFF-USB */ RID_FM_BOOT_ON_USB, /* 1 1 0 0 1 301K Factory Mode Boot ON-USB */ RID_AUD_VDO_CABLE, /* 1 1 0 1 0 365K Audio/Video Cable */ RID_CEA936A_TY_2, /* 1 1 0 1 1 442K CEA936A Type-2 Charger(1) */ RID_FM_BOOT_OFF_UART, /* 1 1 1 0 0 523K Factory Mode Boot OFF-UART */ RID_FM_BOOT_ON_UART, /* 1 1 1 0 1 619K Factory Mode Boot ON-UART */ RID_AUD_DEV_TY_1_REMOTE, /* 1 1 1 1 0 1000.07K Audio Device Type 1 with Remote(1) */ RID_AUD_DEV_TY_1_SEND = RID_AUD_DEV_TY_1_REMOTE , /* 1 1 1 1 0 1002K Audio Device Type 1 / Only Send-End(2) */ RID_USB_MODE, /* 1 1 1 1 1 Open USB Mode, Dedicated Charger or Accessory Detach */ 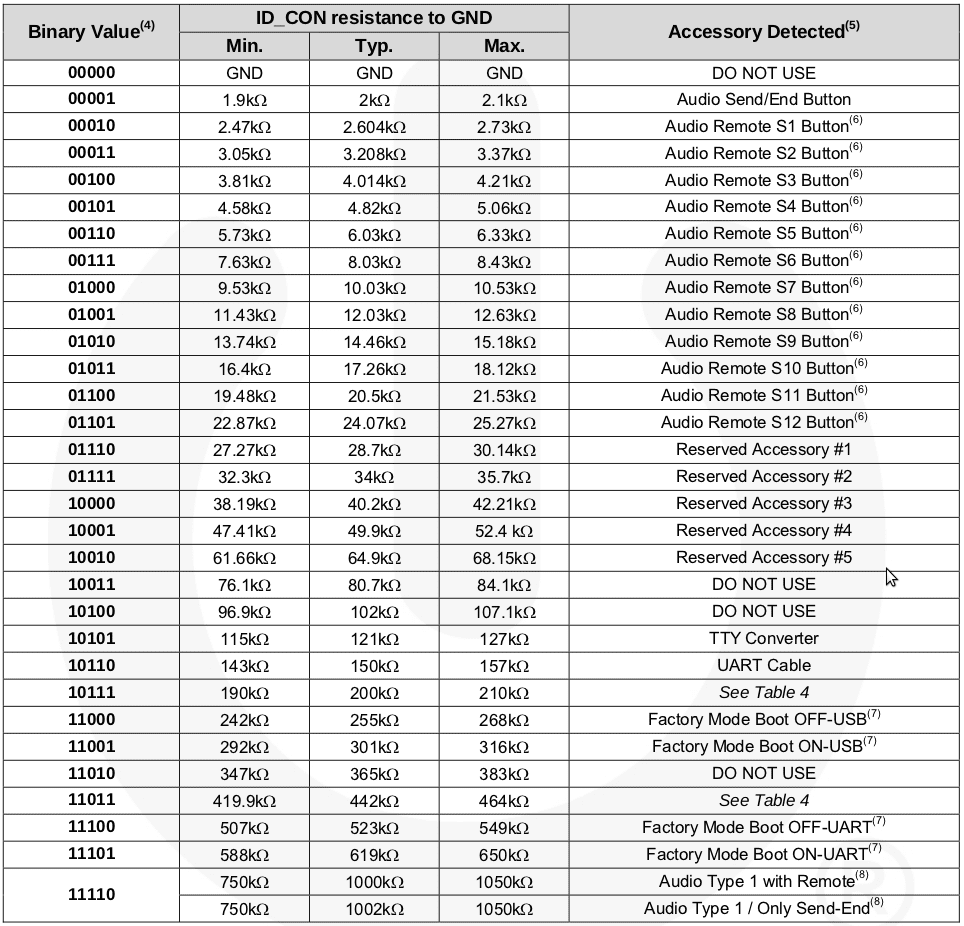 PostmarketOS
dpavlin@nuc:/nuc/pmbootstrap$ ./pmbootstrap.py install --no-fde
[17:54:17] *** (1/5) PREPARE NATIVE CHROOT ***
[17:54:18] *** (2/5) CREATE DEVICE ROOTFS ("samsung-maguro") ***
[17:54:23] (rootfs_samsung-maguro) install
[17:54:27] (rootfs_samsung-maguro) install
[17:54:30] (rootfs_samsung-maguro) write /etc/os-release
[17:54:30] (rootfs_samsung-maguro) mkinitfs samsung-maguro
[17:54:34] *** SET LOGIN PASSWORD FOR: 'dpavlin' ***
New password:
Retype new password:
passwd: password updated successfully
[17:54:43] NOTE: No valid keymap specified for device
[17:54:46] *** (3/5) PREPARE INSTALL BLOCKDEVICE ***
[17:54:47] (native) create samsung-maguro.img (361M)
[17:54:47] (native) mount /dev/install (samsung-maguro.img)
[17:54:47] (native) partition /dev/install (boot: 31M, root: the rest)
[17:54:47] (native) format /dev/installp2
[17:54:48] (native) mount /dev/installp2 to /mnt/install
[Tue Sep 25 17:55:21 2018] EXT4-fs (loop0p2): mounted filesystem with ordered data mode. Opts: (null)
[17:54:48] (native) format /dev/installp1 (boot, ext2), mount to /mnt/install/boot
[Tue Sep 25 17:55:21 2018] EXT4-fs (loop0p1): mounting ext2 file system using the ext4 subsystem
[Tue Sep 25 17:55:21 2018] EXT4-fs (loop0p1): mounted filesystem without journal. Opts: (null)
[17:54:48] *** (4/5) FILL INSTALL BLOCKDEVICE ***
[17:54:48] (native) copy rootfs_samsung-maguro to /mnt/install/
[17:54:53] *** (5/5) FLASHING TO DEVICE ***
[17:54:53] Run the following to flash your installation to the target device:
[17:54:53] * pmbootstrap flasher flash_rootfs
[17:54:53] Flashes the generated rootfs image to your device:
[17:54:53] /nuc/pmbootstrap-work/chroot_native/home/pmos/rootfs/samsung-maguro.img
[17:54:53] (NOTE: This file has a partition table, which contains /boot and / subpartitions. That way we don't need to change the partition layout on your device.)
[17:54:53] * pmbootstrap flasher flash_kernel
[17:54:53] Flashes the kernel + initramfs to your device:
[17:54:53] /nuc/pmbootstrap-work/chroot_rootfs_samsung-maguro/boot
[17:54:53] (NOTE: fastboot also supports booting the kernel/initramfs directly without flashing. Use 'pmbootstrap flasher boot' to do that.)
[17:54:53] * If the above steps do not work, you can also create symlinks to the generated files with 'pmbootstrap export' and flash outside of pmbootstrap.
[17:54:53] NOTE: chroot is still active (use 'pmbootstrap shutdown' as necessary)
[17:54:53] Done
dpavlin@nuc:/nuc/pmbootstrap$ alias pmbootstrap=/nuc/pmbootstrap/pmbootstrap.py
dpavlin@nuc:/nuc/pmbootstrap$ pmbootstrap flasher flash_rootfs
[17:57:10] (native) flash rootfs image
< waiting for any device >
[Tue Sep 25 17:59:17 2018] usb 2-3.1: new high-speed USB device number 22 using xhci_hcd
[Tue Sep 25 17:59:17 2018] usb 2-3.1: New USB device found, idVendor=18d1, idProduct=4e30, bcdDevice= 1.00
[Tue Sep 25 17:59:17 2018] usb 2-3.1: New USB device strings: Mfr=1, Product=2, SerialNumber=3
[Tue Sep 25 17:59:17 2018] usb 2-3.1: Product: Android 1.0
[Tue Sep 25 17:59:17 2018] usb 2-3.1: Manufacturer: Google, Inc
[Tue Sep 25 17:59:17 2018] usb 2-3.1: SerialNumber: 014994B00C01A013
target didn't report max-download-size
Erasing 'system'...
OKAY [ 0.047s]
Sending 'system' (369664 KB)...
OKAY [ 50.498s]
Writing 'system'...
OKAY [ 26.436s]
Finished. Total time: 77.024s
[18:00:02] NOTE: chroot is still active (use 'pmbootstrap shutdown' as necessary)
[18:00:02] Done
dpavlin@nuc:/nuc/pmbootstrap$ [Tue Sep 25 19:24:27 2018] usb 2-3.1: USB disconnect, device number 22
[Tue Sep 25 19:24:27 2018] usb 2-3.1: new high-speed USB device number 23 using xhci_hcd
[Tue Sep 25 19:24:27 2018] usb 2-3.1: unable to get BOS descriptor
[Tue Sep 25 19:24:27 2018] usb 2-3.1: New USB device found, idVendor=0451, idProduct=d010, bcdDevice= 0.00
[Tue Sep 25 19:24:27 2018] usb 2-3.1: New USB device strings: Mfr=33, Product=37, SerialNumber=0
[Tue Sep 25 19:24:27 2018] usb 2-3.1: Product: OMAP4440
[Tue Sep 25 19:24:27 2018] usb 2-3.1: Manufacturer: Texas Instruments
[Tue Sep 25 19:24:30 2018] usb 2-3.1: USB disconnect, device number 23
u-boot dummy-load-sch.pdf ZHIYU ZPB30A1 60W dummy load
input voltage: 12V 0.5A (11-14V)
modeshold run button at power on
Fun1 - dc load (continue working on voltage alarm) serial115200 8n1 pins from bottom of the board upwards
G - GND 3 byte output, first two bytes are BCD voltage (3.35V) and last one is status (1=ok, 0=under voltage alarm) pi@rpi2 ~ $ microcom -s 115200 -p /dev/ttyUSB4 | od -An -t x1 -w3 04 35 01 * 04 36 01 04 35 01 * 04 36 01 * 04 35 01 * 04 36 01 04 35 01 replacement firmware |
Weblog Archives
|
{kind=link}
{kind=link}