OpenDPS
- https://johan.kanflo.com/hacking-the-dps5005/
- https://johan.kanflo.com/opendps-design/
- https://johan.kanflo.com/upgrading-your-dps5005/
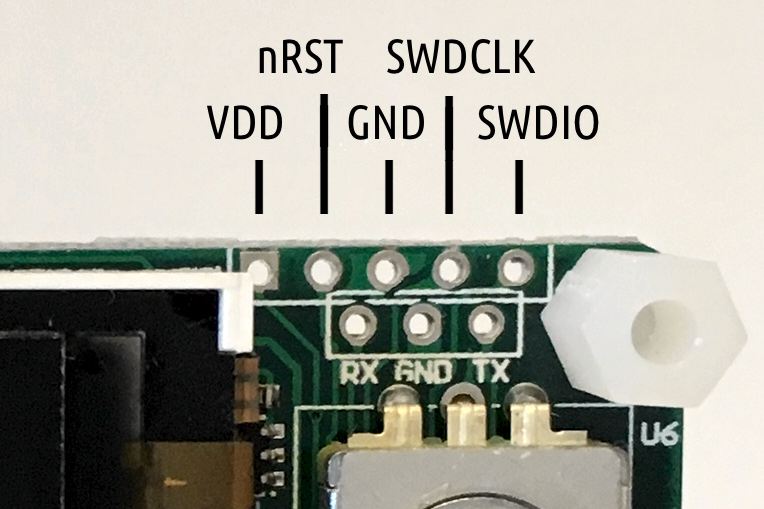
pinout
upgrade to opensource firmware
https://github.com/kanflo/opendps.git
dpavlin@nuc:/nuc$ git clone --recursive https://github.com/kanflo/opendps.git dpavlin@nuc:/nuc$ cd opendps/ dpavlin@nuc:/nuc/opendps$ make -C libopencm3 dpavlin@nuc:/nuc/opendps$ make -C opendps
st-link
connecting rst pin to unpowered st-link stops dps5005 from booting
https://johan.kanflo.com/upgrading-your-dps5005/
openocd
pi@pihdmi:~ $ sudo openocd -f interface/stlink-v2.cfg -f target/stm32f1x.cfg
Open On-Chip Debugger 0.10.0+dev-01489-g06c7a53f1-dirty (2020-11-14-15:21)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
WARNING: interface/stlink-v2.cfg is deprecated, please switch to interface/stlink.cfg
Info : auto-selecting first available session transport "hla_swd". To override use 'transport select <transport>'.
Info : The selected transport took over low-level target control. The results might differ compared to plain JTAG/SWD
Info : Listening on port 6666 for tcl connections
Info : Listening on port 4444 for telnet connections
Info : clock speed 1000 kHz
Info : STLINK V2J28S7 (API v2) VID:PID 0483:3748
Info : Target voltage: 3.273018
Info : stm32f1x.cpu: hardware has 6 breakpoints, 4 watchpoints
Info : starting gdb server for stm32f1x.cpu on 3333
Info : Listening on port 3333 for gdb connections
backup few states
from another terminal
pi@pihdmi:/nuc/opendps $ ./ocd-client.py all | tee 5V-off.txt # exit openocd, turn output on pi@pihdmi:/nuc/opendps $ ./ocd-client.py all | tee 5V-on.txt
erase
pi@pihdmi:/nuc/opendps $ telnet localhost 4444 Trying ::1... Trying 127.0.0.1... Connected to localhost. Escape character is '^]'. Open On-Chip Debugger > reset halt target halted due to debug-request, current mode: Thread xPSR: 0x01000000 pc: 0x080010a4 msp: 0x20001ff0 > flash erase_address unlock 0x08000000 0x10000 device id = 0x10016420 flash size = 64kbytes erased address 0x08000000 (length 65536) in 0.145284s (440.517 KiB/s)
flash
pi@pihdmi:/nuc/opendps/opendps $ make flash
FLASH opendps_DPS5005.srec
(echo "halt; program /nuc/opendps/opendps/opendps_DPS5005.srec verify reset" | nc -4 localhost 4444 2>/dev/null) || \
openocd -f interface/stlink-v2.cfg \
-f target/stm32f1x.cfg \
-c "program opendps_DPS5005.srec verify reset exit" \
2>/dev/null
��������Open On-Chip Debugger
> halt; program /nuc/opendps/opendps/opendps_DPS5005.srec verify reset
target halted due to debug-request, current mode: Thread
xPSR: 0x61000000 pc: 0x08000bb8 msp: 0x20001fb8
target halted due to debug-request, current mode: Thread
xPSR: 0x01000000 pc: 0x080010a4 msp: 0x20001ff0
** Programming Started **
device id = 0x10016420
flash size = 64kbytes
** Programming Finished **
** Verify Started **
** Verified OK **
** Resetting Target **
pi@pihdmi:/nuc/opendps/dpsboot $ make flash
FLASH dpsboot.srec
(echo "halt; program /nuc/opendps/dpsboot/dpsboot.srec verify reset" | nc -4 localhost 4444 2>/dev/null) || \
openocd -f interface/stlink-v2.cfg \
-f target/stm32f1x.cfg \
-c "program dpsboot.srec verify reset exit" \
2>/dev/null
��������Open On-Chip Debugger
> halt; program /nuc/opendps/dpsboot/dpsboot.srec verify reset
target halted due to debug-request, current mode: Thread
xPSR: 0x61000000 pc: 0x08000bb8 msp: 0x20001fb8
target halted due to debug-request, current mode: Thread
xPSR: 0x01000000 pc: 0x080010a4 msp: 0x20001ff0
** Programming Started **
** Programming Finished **
** Verify Started **
** Verified OK **
** Resetting Target **
client software
pi@pihdmi:/nuc/opendps $ pip3 install -r requirements.txt Looking in indexes: https://pypi.org/simple, https://www.piwheels.org/simple Collecting crc16==0.1.1 (from -r requirements.txt (line 1)) Downloading https://www.piwheels.org/simple/crc16/crc16-0.1.1-cp37-cp37m-linux_armv7l.whl Requirement already satisfied: pyserial==3.4 in /usr/lib/python3/dist-packages (from -r requirements.txt (line 2)) (3.4) Installing collected packages: crc16 Successfully installed crc16-0.1.1 pi@pihdmi:/nuc/opendps $ cd dpsctl/ pi@pihdmi:/nuc/opendps/dpsctl $ python3 ./dpsctl.py --device /dev/ttyUSB2 --ping Error: timeout talking to device /dev/ttyUSB2. # swap rx/tx pins pi@pihdmi:/nuc/opendps/dpsctl $ python3 ./dpsctl.py --device /dev/ttyUSB2 --ping Got pong from device pi@pihdmi:/nuc/opendps/dpsctl $ python3 ./dpsctl.py --device /dev/ttyUSB2 --query Func : cv (on) voltage : 5000 current : 1000 V_in : 10.77 V V_out : 5.03 V I_out : 0.001 A pi@pihdmi:/nuc/opendps/dpsctl $ python3 ./dpsctl.py --device /dev/ttyUSB2 -o off pi@pihdmi:/nuc/opendps/dpsctl $ python3 ./dpsctl.py --device /dev/ttyUSB2 --query Func : cv (off) voltage : 5000 current : 1000 V_in : 10.78 V V_out : 1.73 V I_out : 0.001 A pi@pihdmi:/nuc/opendps/dpsctl $ python3 ./dpsctl.py --device /dev/ttyUSB2 --query Func : cv (off) voltage : 5000 current : 1000 V_in : 10.78 V V_out : 0.01 V I_out : 0.000 A
serial upgrade
pi@pihdmi:/nuc/opendps/dpsctl $ python3 dpsctl.py --device /dev/ttyUSB2 -U ../opendps/opendps_DPS5005.bin Download progress: 2% Error: timeout talking to device /dev/ttyUSB2.
SEL on power-on to stay in bootloader
# it bricked my board first time I tried it
esp8266
I had trouble finding toolchain which works with it, I ended up using https://github.com/pfalcon/esp-open-sdk
dpavlin@nuc:/nuc/esp8266/esp-open-sdk$ git remote -v origin https://github.com/pfalcon/esp-open-sdk.git (fetch) origin https://github.com/pfalcon/esp-open-sdk.git (push)
I also needed to replace esptool, since this machine requires python3 version of it
ln -s /nuc/esp32/esptool/esptool.py /nuc/esp8266/esp-open-sdk/xtensa-lx106-elf/bin/esptool.py
wifi config
dpavlin@nuc:/nuc/opendps$ ls -al esp8266-proxy/esp-open-rtos/include/private_ssid_config.h -rw-r--r-- 1 dpavlin dpavlin 60 Aug 4 10:21 esp8266-proxy/esp-open-rtos/include/private_ssid_config.h dpavlin@nuc:/nuc/opendps$ vi esp8266-proxy/esp-open-rtos/include/private_ssid_config.h
build
dpavlin@nuc:/nuc/opendps$ cd esp8266-proxy/ dpavlin@nuc:/nuc/opendps/esp8266-proxy$ cat env.sh export EOR_ROOT=`pwd`/esp-open-rtos export PATH=/nuc/esp8266/esp-open-sdk/xtensa-lx106-elf/bin:$PATH dpavlin@nuc:/nuc/opendps/esp8266-proxy$ . env.sh dpavlin@nuc:/nuc/opendps/esp8266-proxy$ make Merged 1 ELF section
flash
dpavlin@nuc:/nuc/opendps/esp8266-proxy$ make flash
esptool.py -p /dev/ttyUSB0 --baud 115200 write_flash -fs 16m -fm qio -ff 40m \
0x0 esp-open-rtos/bootloader/firmware_prebuilt/rboot.bin 0x1000 esp-open-rtos/bootloader/firmware_prebuilt/blank_config.bin 0x2000 ./firmware/dpsproxy.bin
WARNING: Flash size arguments in megabits like '16m' are deprecated.
Please use the equivalent size '2MB'.
Megabit arguments may be removed in a future release.
esptool.py v3.2-dev
Serial port /dev/ttyUSB0
pi@pihdmi:/nuc/opendps/esp8266-proxy $ /nuc/esp32/esptool/esptool.py --port /dev/ttyUSB3 write_flash 0x0 esp-open-rtos/bootloader/firmware_prebuilt/rboot.bin 0x1000 esp-open-rtos/bootloader/firmware_prebuilt/blank_config.bin 0x2000 ./firmware/dpsproxy.bin
esptool.py v3.2-dev
Serial port /dev/ttyUSB3
Connecting....
Detecting chip type... ESP8266
Chip is ESP8266EX
Features: WiFi
Crystal is 26MHz
MAC: 5c:cf:7f:c2:6b:19
Uploading stub...
Running stub...
Stub running...
Configuring flash size...
Flash will be erased from 0x00000000 to 0x00000fff...
Flash will be erased from 0x00001000 to 0x00001fff...
Flash will be erased from 0x00002000 to 0x00043fff...
Compressed 3104 bytes to 2169...
Wrote 3104 bytes (2169 compressed) at 0x00000000 in 0.3 seconds (effective 79.1 kbit/s)...
Hash of data verified.
Compressed 2048 bytes to 23...
Wrote 2048 bytes (23 compressed) at 0x00001000 in 0.1 seconds (effective 132.3 kbit/s)...
Hash of data verified.
Compressed 268660 bytes to 195361...
Wrote 268660 bytes (195361 compressed) at 0x00002000 in 18.0 seconds (effective 119.6 kbit/s)...
Hash of data verified.
Leaving...
Hard resetting via RTS pin...
test
reset board and verify that it's connecting to wifi
pi@rpi4:/nuc/opendps/dpsctl $ microcom -p /dev/ttyUSB0 -s 9600
connected to /dev/ttyUSB0
Escape character: Ctrl-\
Type the escape character to get to the prompt.
2dnټ�bdbz�$�`dl��x$2�+`b:`:r�pd�zt{�[�8)1J������: sta(4c:11:ae:0d:1f:ab)
add if0
scandone
add 0
aid 16
cnt
connected with dreamhouse, channel 10
dhcp client start...
ip:192.168.3.111,mask:255.255.255.0,gw:192.168.3.1
now test client
pi@rpi4:~ $ /nuc/opendps/dpsctl/dpsctl.py -S 192.168.3.111 ^C pi@rpi4:~ $ export DPSIF=192.168.3.111 pi@rpi4:~ $ /nuc/opendps/dpsctl/dpsctl.py -q Func : cv (off) voltage : 5000 current : 1000 V_in : 9.71 V V_out : 0.00 V I_out : 0.000 A
powering esp8266
3.3v voltage is available at jtag pins, but it can't supply enough current to run esp8266
There is 5v pin from buck converter on top-left pin of 2x4 pins on left side of board (when looking from back side of module)
5v gnd o o o o o o o o
power drain from input voltage is roughly doubled when powering esp8266 from 5v rail
| input voltage | no esp8266 | with esp8266 |
| 7.68 v | 55 mA | 110 mA |
| 9v | 46 mA | 97 mA |