|
Weblog: recent changes

in Dobrica Pavlinušić's random unstructured stuff
|
|
|
This page will try to document my experiment to run mainline kernel on OMAP
CPU 800 MHz ARM Cortex-A8-based TI OMAP3621[1] uart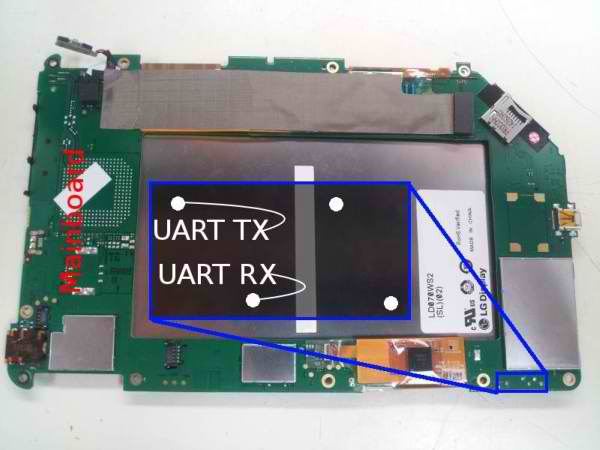
thermoi.pdf
atmo-turboblock-plus-ruk-155454.pdf Vaillant
boiler: VUW SOE 202/2-5 R3
See also Vaillant serial port on boiler information 7-8-9 interface
I think that PWM doesn't apply for my VRT 390 thermometar It also seems that it's not ebus protocol
Very old capacitive touch for EeePC 701 usb
dpavlin@brokeee:~$ lsusb -t -v
/: Bus 05.Port 1: Dev 1, Class=root_hub, Driver=uhci_hcd/2p, 12M
ID 1d6b:0001 Linux Foundation 1.1 root hub
/: Bus 04.Port 1: Dev 1, Class=root_hub, Driver=uhci_hcd/2p, 12M
ID 1d6b:0001 Linux Foundation 1.1 root hub
/: Bus 03.Port 1: Dev 1, Class=root_hub, Driver=uhci_hcd/2p, 12M
ID 1d6b:0001 Linux Foundation 1.1 root hub
/: Bus 02.Port 1: Dev 1, Class=root_hub, Driver=uhci_hcd/2p, 12M
ID 1d6b:0001 Linux Foundation 1.1 root hub
/: Bus 01.Port 1: Dev 1, Class=root_hub, Driver=ehci-pci/8p, 480M
ID 1d6b:0002 Linux Foundation 2.0 root hub
|__ Port 5: Dev 2, If 0, Class=Mass Storage, Driver=usb-storage, 480M
ID 0cf2:6225 ENE Technology, Inc. SD card reader (UB6225)
|__ Port 8: Dev 3, If 0, Class=Hub, Driver=hub/4p, 480M
ID 05e3:0608 Genesys Logic, Inc. Hub
|__ Port 3: Dev 5, If 1, Class=Video, Driver=uvcvideo, 480M
ID eb1a:2761 eMPIA Technology, Inc. EeePC 701 integrated Webcam
|__ Port 3: Dev 5, If 0, Class=Video, Driver=uvcvideo, 480M
ID eb1a:2761 eMPIA Technology, Inc. EeePC 701 integrated Webcam
|__ Port 1: Dev 4, If 0, Class=Human Interface Device, Driver=usbhid, 1.5M
ID 0eef:0001 D-WAV Scientific Co., Ltd eGalax TouchScreen
https://forum.odroid.com/viewtopic.php?t=15239#p127773 xorg error[ 39.523] (II) event14 - eGalax Inc. Touch Touchscreen: is tagged by udev as: Tablet [ 39.719] (EE) event14 - eGalax Inc. Touch Touchscreen: libinput bug: missing tablet capabilities: btn-stylus resolution. Ignoring this device. [ 39.719] (II) event14 - eGalax Inc. Touch Touchscreen: device is a tablet [ 39.720] (II) event14 - failed to create input device '/dev/input/event14'. [ 39.720] (EE) libinput: eGalax Inc. Touch Touchscreen: Failed to create a device for /dev/input/event14 [ 39.720] (EE) PreInit returned 2 for "eGalax Inc. Touch Touchscreen" fix from https://www.embedded-engineer.de/dokuwiki/doku.php?id=start:egalax_touchscreen
apt install xserver-xorg-input-evdev
dpavlin@brokeee:~$ cat /usr/lib/udev/hwdb.d/61-evdev-local.hwdb
evdev:name:eGalax Inc. Touch Touchscreen*
EVDEV_ABS_00=::300
EVDEV_ABS_01=::300
systemd-hwdb update
udevadm trigger /dev/input/eventXX
root@brokeee:/etc/X11/xorg.conf.d# apt install xserver-xorg-input-evdev
root@brokeee:/etc/X11/xorg.conf.d# cat evdev-touch.conf
Section "InputClass"
Identifier "eGalax Inc. Touch Touchscreen"
MatchUSBID "0eef:0001"
Driver "evdev"
# https://www.x.org/releases/X11R7.5/doc/man/man4/evdev.4.html
Option "InvertX" "true"
EndSection
On my touchscreen with touch flex exiting on bottom left, I have to swap X axis calibrationdpavlin@brokeee:~$ xinput_calibrator --output-type xorg.conf.d Warning: multiple calibratable devices found, calibrating last one (eGalax Inc. Touch Touchscreen) use --device to select another one. Calibrating EVDEV driver for "eGalax Inc. Touch Touchscreen" id=11 current calibration values (from XInput): min_x=0, max_x=2047 and min_y=0, max_y=2047 Doing dynamic recalibration: Inverting X and/or Y axis... Setting calibration data: 1997, 73, 120, 1835 --> Making the calibration permanent <-- copy the snippet below into '/etc/X11/xorg.conf.d/99-calibration.conf' (/usr/share/X11/xorg.conf.d/ in some distro's) Section "InputClass" Identifier "calibration" MatchProduct "eGalax Inc. Touch Touchscreen" Option "Calibration" "1997 73 120 1835" Option "SwapAxes" "0" EndSection userspace driver for newer chiphttps://github.com/twoerner/hdmi-usb-touch dpavlin@brokeee:~/hdmi-usb-touch$ git remote -v origin https://github.com/twoerner/hdmi-usb-touch (fetch) origin https://github.com/twoerner/hdmi-usb-touch (push) dpavlin@brokeee:~/hdmi-usb-touch$ autoreconf -i dpavlin@brokeee:~/hdmi-usb-touch$ sudo apt install libudev-dev dpavlin@brokeee:~/hdmi-usb-touch$ ./configure
Tegra2_TRM_DP04508001v01p.pdf
I will try to collect useful stuff about Tegra latest upstream source on this page. Nvidia Tegra 2/3 APX/nv3p protocol implementationqemuhttps://github.com/digetx/tegra2_qemu i2cdetect
root@ac100:~# i2cdetect -l
i2c-1 i2c 7000c400.i2c I2C adapter
i2c-2 i2c 7000d000.i2c I2C adapter
i2c-0 i2c 7000c000.i2c I2C adapter
root@ac100:~# i2cdetect -y 0
Error: Can't use SMBus Quick Write command on this bus
root@ac100:~# i2cdetect -F 0
Functionalities implemented by /dev/i2c-0:
I2C yes
SMBus Quick Command no
SMBus Send Byte yes
SMBus Receive Byte yes
SMBus Write Byte yes
SMBus Read Byte yes
SMBus Write Word yes
SMBus Read Word yes
SMBus Process Call yes
SMBus Block Write yes
SMBus Block Read no
SMBus Block Process Call no
SMBus PEC yes
I2C Block Write yes
I2C Block Read yes
root@ac100:~# i2cdetect -y -r 0
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- UU --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 4f
50: 50 51 52 53 54 55 56 57 -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
grate-driver tegra2 support for mainlinehttps://github.com/grate-driver https://github.com/grate-driver/grate/wiki/Grate-driver
https://wiki.debian.org/CreatePackageFromPPA
https://code.launchpad.net/~grate-driver/+archive/ubuntu/ppa
sudo apt install devscripts build-essential software-properties-common
sudo add-apt-repository ppa:grate-driver/ppa
# enable only deb-src (suggested beaver doesn't work for me)
root@tegra20:/home/dpavlin# cat /etc/apt/sources.list.d/grate-driver-ubuntu-ppa-disco.list
#deb http://ppa.launchpad.net/grate-driver/ppa/ubuntu beaver main
deb-src http://ppa.launchpad.net/grate-driver/ppa/ubuntu disco main
apt update # make sure that is pass, use apt-key adv --recv-key if needed
# build order is important
apt-get build-dep libdrm
apt source --build libdrm
dpkg -i libdrm*.deb
apt-get build-dep xserver-xorg-video-opentegra
apt source --build xserver-xorg-video-opentegra
# this will fail to instal because of libturbojpg dependency
root@x200:/home/dpavlin/grade-build/xserver-xorg-video-opentegra-201901152016~grate~feac058~ubuntu19.04.1# vi debian/control
Package: xserver-xorg-video-opentegra
Architecture: armhf
Depends: ${shlibs:Depends}, ${misc:Depends}, ${xviddriver:Depends},
libdrm-tegra0, liblz4-1, libturbojpeg0 (>= 1.5.0), libpng16-16,
Provides: ${xviddriver:Provides}
Description: X.Org X server -- Opensource driver for NVIDIA Tegra.
This package provides HW-accelerated opensource driver for NVIDIA
Tegra20+ SoC's from the GRATE project <URL:https://github.com/grate-driver>.
root@x200:/home/dpavlin/grade-build/xserver-xorg-video-opentegra-201901152016~grate~feac058~ubuntu19.04.1# dpkg-buildpackage
root@tegra20:/home/dpavlin# apt-get install x11-xserver-utils
root@tegra20:/etc# git diff
diff --git a/X11/xinit/xserverrc b/X11/xinit/xserverrc
index 94494ec..e6c4aa4 100755
--- a/X11/xinit/xserverrc
+++ b/X11/xinit/xserverrc
@@ -1,3 +1,3 @@
#!/bin/sh
-exec /usr/bin/X -nolisten tcp "$@"
+exec /usr/bin/X -listen tcp "$@"
# let's try it
startx
root@tegra20:/home/dpavlin# export DISPLAY=:0
root@tegra20:/home/dpavlin# xhost +
access control disabled, clients can connect from any host
# on another computer
dpavlin@x200:~$ x2x -to tegra20:0 -south
# and one flip of display later, I have working X11 with remote mouse and keyboard
root@tegra20:/home/dpavlin# xrandr --output LVDS-0 --rotation inverted
# to get mesa to compile beause of dependencies, I needed to update to buster
root@tegra20:/home/dpavlin# apt-get build-dep mesa
Reading package lists... Done
Reading package lists... Done
Building dependency tree
Reading state information... Done
Some packages could not be installed. This may mean that you have
requested an impossible situation or if you are using the unstable
distribution that some required packages have not yet been created
or been moved out of Incoming.
The following information may help to resolve the situation:
The following packages have unmet dependencies:
builddeps:mesa : Depends: debhelper (>= 11) but 10.2.5 is to be installed
Depends: quilt (>= 0.63-8.2~) but it is not going to be installed
Depends: x11proto-dev but it is not installable
Depends: libxcb-dri3-dev (>= 1.13) but it is not going to be installed
Depends: libxcb-present-dev (>= 1.13) but it is not going to be installed
Depends: llvm-7-dev (>= 1:7~) but it is not installable
Depends: libwayland-dev (>= 1.15.0) but 1.12.0-1 is to be installed
Depends: libwayland-egl-backend-dev (>= 1.15.0) but it is not installable
Depends: libclang-7-dev (>= 1:7~) but it is not installable
Depends: libclc-dev (>= 0.2.0+git20180917-1~) but it is not going to be installed
Depends: wayland-protocols (>= 1.9) but it is not going to be installed
Depends: libglvnd-core-dev but it is not installable
E: Unable to correct problems, you have held broken packages.
# after buster upgrade and rebuild of everything
(with dpkg-buildpackage)
root@tegra20:/home/dpavlin/grade-build# apt source --build mesa
dpkg -i *.deb
~50 fps with 25% cpu usage in glxgears
root@tegra20:/home/dpavlin/grade-build# apt-get build-dep libvdpau-tegra
Reading package lists... Done
Reading package lists... Done
Building dependency tree
Reading state information... Done
Some packages could not be installed. This may mean that you have
requested an impossible situation or if you are using the unstable
distribution that some required packages have not yet been created
or been moved out of Incoming.
The following information may help to resolve the situation:
The following packages have unmet dependencies:
builddeps:libvdpau-tegra : Depends: libdri2-dev but it is not installable
E: Unable to correct problems, you have held broken packages.
# sigh
root@tegra20:/home/dpavlin/grade-build# apt source --build libvdpau-tegra
...
dpkg-checkbuilddeps: error: Unmet build dependencies: libxv-dev libdri2-dev
root@tegra20:/home/dpavlin/grade-build# apt --fix-broken install
root@tegra20:/home/dpavlin/grade-build# apt-get install libxv-dev
root@tegra20:/home/dpavlin/grade-build/libvdpau-tegra-201901220047~grate~8efb41c~ubuntu18.10.1# vi debian/control
remove libdri2-dev and libdri2
root@tegra20:/home/dpavlin/grade-build/libvdpau-tegra-201901220047~grate~8efb41c~ubuntu18.10.1# dpkg-buildpackage
dpkg -i ../libvdpau-tegra*.deb
partition table support
Codename grouper https://www.unlegacy-android.org/projects/unlegacy-android/wiki/Grouper_info PostmarketOScompiledpavlin@klin:/klin/pmos/pmbootstrap$ pmbootstrap install --android-recovery-zip pmbootstrap flasher --method=adb sideload
To make pmbootstrap flasher work, I have to issue adb kill-server on my normal terminal console so that postmarketos desktop network config
dpavlin@klin:/klin/pmos/pmbootstrap$ grep -A3 usb0 /etc/network/interfaces
allow-hotplug usb0
iface usb0 inet static
# postmarket os
address 172.16.42.2
netmask 255.255.255.0
dpavlin@klin:/klin/pmos/pmbootstrap$ grep -A5 pmos ~/.ssh/config
Host pmos
HostName 172.16.42.1
UserKnownHostsFile /dev/null
StrictHostKeyChecking=no
reboot-mode to reboot into recoveryhttps://gitlab.com/postmarketOS/pmaports/-/merge_requests/442 pogo pinsTop ground. Bottom +5 volts.
This page describes pre-prelease version of usb armory, so if you are receiving release version, I had wrong expectations from this board: I was hoping to be able to use GPIO for serial or connecting sensors and that is not possible.
SoC: NXP i.MX6ULZ ARM® Cortex™-A7 900 MHz https://github.com/inversepath/usbarmory-debian-base_image dpavlin@klin:~/usb-armory/usbarmory-debian-base_image$ ls -al usbarmory-mark-two-debian_stretch-base_image-20191013.raw -rw-r--r-- 1 root root 3670016000 Oct 13 13:30 usbarmory-mark-two-debian_stretch-base_image-20191013.raw dpavlin@nuc:/mnt/klin/home/dpavlin/usb-armory/usbarmory-debian-base_image$ dd if=usbarmory-mark-two-debian_stretch-base_image-20191013.raw of=/dev/sdb bs=1M dpavlin@nuc:~$ dmesg [764607.538898] usb 2-1: new high-speed USB device number 34 using xhci_hcd [764607.689068] usb 2-1: New USB device found, idVendor=0525, idProduct=a4a2, bcdDevice= 4.19 [764607.689078] usb 2-1: New USB device strings: Mfr=1, Product=2, SerialNumber=0 [764607.689082] usb 2-1: Product: RNDIS/Ethernet Gadget [764607.689100] usb 2-1: Manufacturer: Linux 4.19.78-0 with 2184000.usb [764607.900916] cdc_subset: probe of 2-1:1.0 failed with error -22 [764607.902622] cdc_subset 2-1:1.1 usb0: register 'cdc_subset' at usb-0000:00:14.0-1, Linux Device, ae:47:47:81:a0:a4 [764607.902666] usbcore: registered new interface driver cdc_subset [764607.902711] cdc_ether: probe of 2-1:1.0 failed with error -16 [764607.902732] usbcore: registered new interface driver cdc_ether [764607.914234] cdc_subset 2-1:1.1 enp0s20u1i1: renamed from usb0 network setup
dpavlin@nuc:~$ sudo ifconfig enp0s20u1i1 10.0.0.2 netmask 255.255.255.0
dpavlin@nuc:~$ sudo iptables -t nat -A POSTROUTING -s 10.0.0.0/24 -o eth0 -j MASQUERADE
dpavlin@nuc:~$ ssh usbarmory@10.0.0.1
# password is usbarmory
usbarmory@usbarmory:~$ uname -a
Linux usbarmory 4.19.78-0 #1 PREEMPT Sun Oct 13 11:05:18 UTC 2019 armv7l GNU/Linux
usbarmory@usbarmory:~$ cat /proc/cpuinfo
processor : 0
model name : ARMv7 Processor rev 5 (v7l)
BogoMIPS : 109.09
Features : half thumb fastmult vfp edsp neon vfpv3 tls vfpv4 idiva idivt vfpd32 lpae
CPU implementer : 0x41
CPU architecture: 7
CPU variant : 0x0
CPU part : 0xc07
CPU revision : 5
Hardware : Freescale i.MX6 Ultralite (Device Tree)
Revision : 0000
Serial : 0000000000000000
usbarmory@usbarmory:~$ free
total used free shared buff/cache available
Mem: 512204 25588 436744 7624 49872 467984
Swap: 0 0 0
boot select switchSwitch near sdcard select booting from emmc or microsd (silkscreen is somewhat poor, but by default bafore removing sticker it will boot from sdcard) If it's closer to sdcard, it will boot from sdcard image delivered on devicePassword for image delivered with device is not usbarmory (?) In fact, it doesn't have usbarmory user in /etc/passwd, but has it in /etc/shadow, go figure! root@usbarmory:/# cat /etc/passwd root:x:0:0:root:/root:/bin/bash daemon:x:1:1:daemon:/usr/sbin:/usr/sbin/nologin bin:x:2:2:bin:/bin:/usr/sbin/nologin sys:x:3:3:sys:/dev:/usr/sbin/nologin sync:x:4:65534:sync:/bin:/bin/sync games:x:5:60:games:/usr/games:/usr/sbin/nologin man:x:6:12:man:/var/cache/man:/usr/sbin/nologin lp:x:7:7:lp:/var/spool/lpd:/usr/sbin/nologin mail:x:8:8:mail:/var/mail:/usr/sbin/nologin news:x:9:9:news:/var/spool/news:/usr/sbin/nologin uucp:x:10:10:uucp:/var/spool/uucp:/usr/sbin/nologin proxy:x:13:13:proxy:/bin:/usr/sbin/nologin www-data:x:33:33:www-data:/var/www:/usr/sbin/nologin backup:x:34:34:backup:/var/backups:/usr/sbin/nologin list:x:38:38:Mailing List Manager:/var/list:/usr/sbin/nologin irc:x:39:39:ircd:/var/run/ircd:/usr/sbin/nologin gnats:x:41:41:Gnats Bug-Reporting System (admin):/var/lib/gnats:/usr/sbin/nologin nobody:x:65534:65534:nobody:/nonexistent:/usr/sbin/nologin systemd-timesync:x:100:102:systemd Time Synchronization,,,:/run/systemd:/bin/false systemd-network:x:101:103:systemd Network Management,,,:/run/systemd/netif:/bin/false systemd-resolve:x:102:104:systemd Resolver,,,:/run/systemd/resolve:/bin/false systemd-bus-proxy:x:103:105:systemd Bus Proxy,,,:/run/systemd:/bin/false _apt:x:104:65534::/nonexistent:/bin/false messagebus:x:105:108::/var/run/dbus:/bin/false sshd:x:106:65534::/run/sshd:/usr/sbin/nologin interlock:x:1000:1000::/home/interlock:/bin/bash lcars:x:1001:1001::/home/lcars:/bin/bash root@usbarmory:/# cat /etc/shadow root:*:18068:0:99999:7::: daemon:*:18068:0:99999:7::: bin:*:18068:0:99999:7::: sys:*:18068:0:99999:7::: sync:*:18068:0:99999:7::: games:*:18068:0:99999:7::: man:*:18068:0:99999:7::: lp:*:18068:0:99999:7::: mail:*:18068:0:99999:7::: news:*:18068:0:99999:7::: uucp:*:18068:0:99999:7::: proxy:*:18068:0:99999:7::: www-data:*:18068:0:99999:7::: backup:*:18068:0:99999:7::: list:*:18068:0:99999:7::: irc:*:18068:0:99999:7::: gnats:*:18068:0:99999:7::: nobody:*:18068:0:99999:7::: systemd-timesync:*:18068:0:99999:7::: systemd-network:*:18068:0:99999:7::: systemd-resolve:*:18068:0:99999:7::: systemd-bus-proxy:*:18068:0:99999:7::: _apt:*:18068:0:99999:7::: messagebus:*:18068:0:99999:7::: sshd:*:18068:0:99999:7::: usbarmory:$6$rcyB4m4EPv$udqWloCZH/Av1IkJVuZHyWMhw/fYkhLGevlo17C3x6qMemSHUmPPAQrvc0SaY.yWVIIU0ADL0g54MZmidcxFn.:18068:0:99999:7::: lcars:$6$iFljmotV$gnK66oZpz7BD3BqlFpPWoY/Q1tey8in75868neosxypKswjSoNDQotiMBZ9hh.vQBDyltA08z2Vji/QjElv4g.:18072:0:99999:7::: interlock:!:18072:0:99999:7::: After adding usbarmory account, running apt upgrade (since image has old kernel) device isn't bootable any more (at least it's not detected by host in which it's plugged in). Let's try to rebuild image for emmc and flash it. Well, re-build fails with patches allready applied errors in linux source, so let's wipe it: root@813046ba7c77:/opt/armory# rm -Rf linux-* u-boot-2019.07* root@813046ba7c77:/opt/armory# make all V=mark-two IMX=imx6ull BOOT=eMMC -j 8 pads on boardthere is kicad project of production one which just removed pads https://github.com/f-secure-foundry/usbarmory/tree/master/hardware/mark-two
from changelog those pads might be jtag (since it's enabled in u-boot), but schematics confirms it. It seems that 8 gpio pins are available using additional board: https://github.com/inversepath/usbarmory/tree/master/hardware/mark-two-debug-accessory sdcard vs emmc speedroot@usbarmory:/mnt/klin/home/dpavlin/usb-armory/usbarmory-debian-base_image# hdparm -Tt /dev/mmcblk[01] /dev/mmcblk0: # -- sdcard Timing cached reads: 664 MB in 2.00 seconds = 331.99 MB/sec Timing buffered disk reads: 34 MB in 3.03 seconds = 11.21 MB/sec /dev/mmcblk1: # -- emmc Timing cached reads: 716 MB in 2.00 seconds = 357.40 MB/sec Timing buffered disk reads: 128 MB in 3.04 seconds = 42.17 MB/sec communityhttps://groups.google.com/forum/#!forum/usbarmory led heartbeat offhttps://photos.app.goo.gl/rRrzfbbs4GGjt3ePA very bright and annoying in dark room sbarmory@usbarmory:/sys/class/leds/LED_WHITE$ cat trigger none kbd-scrolllock kbd-numlock kbd-capslock kbd-kanalock kbd-shiftlock kbd-altgrlock kbd-ctrllock kbd-altlock kbd-shiftllock kbd-shiftrlock kbd-ctrlllock kbd-ctrlrlock mmc0 mmc1 cpu cpu0 [heartbeat] root@usbarmory:/sys/devices/soc0/leds/leds/LED_WHITE# echo none > trigger network speedroot@usbarmory:~# iperf3 -c 10.0.0.2 Connecting to host 10.0.0.2, port 5201 [ 4] local 10.0.0.1 port 33574 connected to 10.0.0.2 port 5201 [ ID] Interval Transfer Bandwidth Retr Cwnd [ 4] 0.00-1.03 sec 23.0 MBytes 188 Mbits/sec 0 174 KBytes [ 4] 1.03-2.00 sec 20.6 MBytes 178 Mbits/sec 0 272 KBytes [ 4] 2.00-3.01 sec 21.1 MBytes 176 Mbits/sec 0 286 KBytes [ 4] 3.01-4.01 sec 21.8 MBytes 182 Mbits/sec 0 297 KBytes [ 4] 4.01-5.00 sec 20.1 MBytes 171 Mbits/sec 0 297 KBytes [ 4] 5.00-6.00 sec 21.0 MBytes 176 Mbits/sec 0 329 KBytes [ 4] 6.00-7.00 sec 20.3 MBytes 171 Mbits/sec 0 329 KBytes [ 4] 7.00-8.00 sec 20.4 MBytes 171 Mbits/sec 0 329 KBytes [ 4] 8.00-9.00 sec 20.3 MBytes 171 Mbits/sec 0 329 KBytes [ 4] 9.00-10.00 sec 20.1 MBytes 169 Mbits/sec 0 329 KBytes - - - - - - - - - - - - - - - - - - - - - - - - - [ ID] Interval Transfer Bandwidth Retr [ 4] 0.00-10.00 sec 209 MBytes 175 Mbits/sec 0 sender [ 4] 0.00-10.00 sec 208 MBytes 174 Mbits/sec receiver iperf Done. network setup for desktopdpavlin@nuc:~$ grep usbarmory -A 5 /etc/network/interfaces # usbarmory allow-hotplug enx1a5589a26942 iface enx1a5589a26942 inet static address 10.0.0.2 netmask 255.255.255.0 post-up iptables -t nat -A POSTROUTING -s 10.0.0.0/24 -o eth0 -j MASQUERADE bluetoothhttps://github.com/inversepath/usbarmory/wiki/Bluetooth root@usbarmory:/home/usbarmory# microcom -p /dev/ttymxc0 AT+GMR "1.0.0-017" armoryctlusbarmory@usbarmory:~$ sudo apt install armoryctl since device is on stretch it has go 1.7 which can't compile it. dpavlin@klin:~/usb-armory$ git clone https://github.com/inversepath/armoryctl dpavlin@klin:~/usb-armory/armoryctl$ make armoryctl GOARCH=arm github.com/inversepath/armoryctl/anna_b112 # github.com/inversepath/armoryctl/anna_b112 anna_b112/openocd.go:328:9: undefined: strings.ReplaceAll anna_b112/openocd.go:329:8: undefined: strings.ReplaceAll note: module requires Go 1.12make: *** [Makefile:27: armoryctl] Error 2 After compile:
usbarmory@usbarmory:~$ sudo ./armoryctl tusb id
TUSB320
usbarmory@usbarmory:~$ sudo ./armoryctl ble info
manufacturer:"u-blox" model:"ANNA-B1" serial:"0" sw:"1.0.0-017" device_name:"USBARMORY-MKII-DUT-3776"
usbarmory@usbarmory:~$ sudo ./armoryctl se1 info
serial:0x0123455d2a9039e5ee revision:0x00006002
usbarmory@usbarmory:~$ sudo ./armoryctl pmic info
id:0x4("PF1510") family:0xf("15") otp:"A6" rev:0x11
i2c
root@usbarmory:/home/usbarmory# i2cdetect -l
root@usbarmory:/home/usbarmory# modprobe i2c-dev
root@usbarmory:/home/usbarmory# i2cdetect -l
i2c-0 i2c 21a0000.i2c I2C adapter
root@usbarmory:/home/usbarmory# i2cdetect -y 0
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- 08 -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- 31 -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- 48 -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: 60 61 -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
datasheet: ch376ds1.pdf breakout schematics: CH376S-31813MPSch.pdf arduino: https://github.com/djuseeq/Ch376msc Analog sensors MQ-2
and other combustible steam
board markings: KS123-35Y00K MQ-4
board markings: LM-22 MQ-7
board markings: LM-22 https://www.instructables.com/id/Arduino-CO-Monitor-Using-MQ-7-Sensor/ My changes for single-line NAME=value output https://github.com/dpavlin/mq7-co-monitor running old distributions under systemd-nspawn install on hostapt install systemd-container setup old distributionos-releaseroot@saturn4:~# cat /saturn/etc/os-release PRETTY_NAME="Debian GNU/Linux 4 (etch)" NAME="Debian GNU/Linux" VERSION_ID="4" VERSION="4 (etch)" VERSION_CODENAME=etch ID=debian HOME_URL="https://www.debian.org/" SUPPORT_URL="https://www.debian.org/support" BUG_REPORT_URL="https://bugs.debian.org/" consoleroot@saturn4:/saturn/etc# machinectl shell saturn /usr/bin/uptime Failed to get shell PTY: Protocol error fix it by adding console to inittab dpavlin@saturn:~$ grep console /etc/inittab 0:2345:respawn:/sbin/getty 38400 console network configfull access to host network, services are configured to listen to localhost root@saturn4:/etc/systemd# mkdir nspawn root@saturn4:/etc/systemd# cat > nspawn/saturn.nspawn [Network] VirtualEthernet=no start itroot@saturn4:~# mv /saturn/ /var/lib/machines/ root@saturn4:~# machinectl enable saturn Created symlink /etc/systemd/system/machines.target.wants/systemd-nspawn@saturn.service �/lib/systemd/system/systemd-nspawn@.service. root@saturn4:~# machinectl start saturn alternativeit seems that I'm unable to get console to work with systemd-nspawn and Debian etch. So alternative approach is just to run services from systemd service file using chroot root@saturn4:/etc/systemd/system# cat saturn\@.service [Unit] Description=SocialText saturn services [Service] User=root Type=forking ExecStart=/etc/systemd/system/saturn.sh /etc/init.d/%i start ExecStop=/etc/systemd/system/saturn.sh /etc/init.d/%i stop Restart=on-failure [Install] WantedBy=multi-user.target root@saturn4:/etc/systemd/system# systemctl start saturn@postgresql-8.1 root@saturn4:/etc/systemd/system# systemctl start saturn@ceqlotron root@saturn4:/etc/systemd/system# systemctl start saturn@st-apache root@saturn4:/etc/systemd/system# systemctl start saturn@apache2
Product Name: GP2Y1010AU0F dust sensor module https://www.instructables.com/id/How-to-Interface-With-Optical-Dust-Sensor/ Too cheap to be useful? https://techblog.calvinboey.com/review-of-the-sharp-dust-sensor-gp2y1010au0f/ https://d.lij.uno/misc-dust-detector-with-arduino-serial-comm.html Technical parametersPower supply voltage: DC5 � 2V Operating Current: 20mA (peak) Sensitivity: 0.5V / (0.1mg / m3) The minimum detection level of particles: 0.8 m Clean air voltage: 0.9V typ. Working temperature: -10 ~ 65 Storage temperature: -20 ~ 80 Size: 46mm � 30mm � 17.6mm Size Weight: 15g arduinohttps://github.com/mickey9801/GP2Y1010AU0F
calcVoltage = voMeasured * (this->_VCC / 1024.0); Source code here works much better if you do 10 readings and average them before sending result tasmota |
Weblog Archives
|