https://github.com/raphaelbs/esp32-cam-ai-thinker/blob/master/docs/about-esp32-cam.md
connection, flashing
connected to pl2303 serial
| pl2303 | esp32cam |
| 3v3 | not connected |
| rxd | UnR |
| rxd | UOT |
| gnd | GND |
| 5v | 5V |
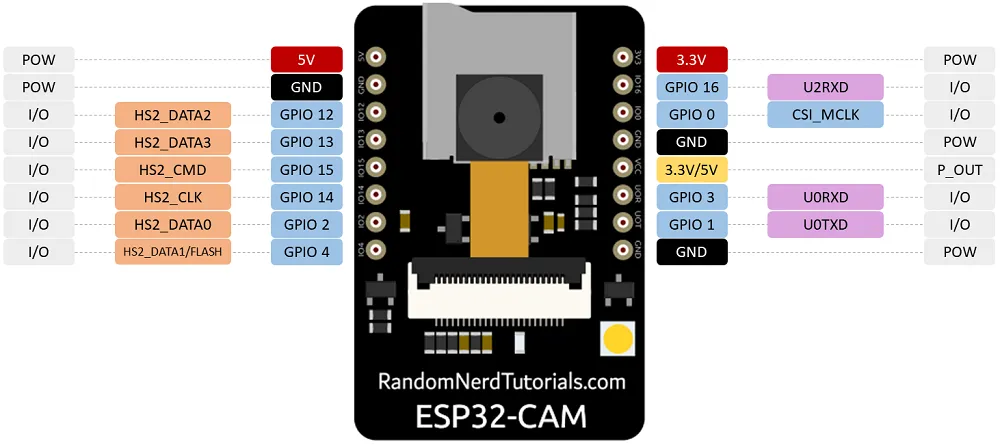
To program the board, I userd jumper to jump GPIO0 with GND pin next to it.
https://github.com/raphaelbs/esp32-cam-ai-thinker/blob/master/docs/esp32cam-pin-notes.md
spi
SDI = IO12
SDO = IO13
SCK = IO14
CS = IO15
improved example app
https://github.com/easytarget/esp32-cam-webserver
cp myconfig.sample.h myconfig.h vi myconfig.h dpavlin@nuc:/nuc/esp32/esp32-cam-webserver$ platformio run dpavlin@nuc:/nuc/esp32/esp32-cam-webserver$ pio run -t upload --upload-port /dev/ttyUSB2 "/home/dpavlin/.platformio/penv/bin/python" "/home/dpavlin/.platformio/packages/tool-esptoolpy/esptool.py" \ --chip esp32 --port "/dev/ttyUSB3" --baud 460800 --before default_reset --after hard_reset \ write_flash -z --flash_mode dio --flash_freq 40m --flash_size detect \ 0x1000 /home/dpavlin/.platformio/packages/framework-arduinoespressif32/tools/sdk/bin/bootloader_dio_40m.bin \ 0x8000 /nuc/esp32/esp32-cam-webserver/.pio/build/esp32cam/partitions.bin \ 0xe000 /home/dpavlin/.platformio/packages/framework-arduinoespressif32/tools/partitions/boot_app0.bin \ 0x10000 .pio/build/esp32cam/firmware.bin
timelapse
ocr on device
https://github.com/jomjol/AI-on-the-edge-device
https://github.com/jomjol/AI-on-the-edge-device/wiki/Installation
Remove glue from lens (very hard, using sharp knife), and rotate lens by 45 degrees until
picture is sharp (I had to use pliers to do this).
dpavlin@nuc:/nuc/esp32/AI-on-the-edge-device$ vi sd-card/wlan.ini dpavlin@nuc:/nuc/esp32/AI-on-the-edge-device/code$ pio run dpavlin@nuc:/nuc/esp32/AI-on-the-edge-device/code$ pio run -v -t upload --upload-port /dev/ttyUSB3 "/home/dpavlin/.platformio/penv/bin/python" "/home/dpavlin/.platformio/packages/tool-esptoolpy/esptool.py" \ --chip esp32 --port "/dev/ttyUSB3" --baud 460800 --before default_reset --after hard_reset \ write_flash -z --flash_mode dio --flash_freq 40m --flash_size detect \ 0x1000 /nuc/esp32/AI-on-the-edge-device/code/.pio/build/esp32cam/bootloader.bin \ 0x8000 /nuc/esp32/AI-on-the-edge-device/code/.pio/build/esp32cam/partitions.bin \ 0xd000 /nuc/esp32/AI-on-the-edge-device/code/.pio/build/esp32cam/ota_data_initial.bin \ 0x10000 .pio/build/esp32cam/firmware.bin # original flashing instructions esptool write_flash 0x01000 bootloader.bin 0x08000 partitions.bin 0x10000 firmware.bin # download raw picture wget 192.168.3.112/img_tmp/raw.jpg
old, obsolete problems
It seems that my module is usually known as AI thinker variant. It has terrible picture which starts with huge green bias.
It also doesn't work for me in resolutions below 1024x768 (in current esp32 example as of 2019-08-02).
Plugging it into external 5V power supply did not helped much.
To solve green tint, I just left esp32cam module plugged in whole day and night. I guess that image sensor got discharged during night, but next day picture was fine.
Problem with image resolution was fixed by updating to more recent version of ESP32 support for Arduino (as of 2020-04-20 it works fine)
Home Assistant
https://jamesachambers.com/cheap-esp32-cam-home-assistant-esphome-camera-guide/
esphome:
name: esp32cam
friendly_name: esp32cam
esp32:
board: esp32cam
framework:
type: arduino
# Enable logging
logger:
level: VERBOSE
tx_buffer_size: 256
# Enable Home Assistant API
api:
encryption:
key: "MsJJJiDv9FTjZ1w8dfoy3Z8cQWjGOsk0m4Wgge0B+8w="
services: # change camera parameters on-the-fly
- service: camera_set_param
variables:
name: string
value: int
then:
- lambda: |-
bool state_return = false;
if (("contrast" == name) && (value >= -2) && (value <= 2)) { id(espcam).set_contrast(value); state_return = true; }
if (("brightness" == name) && (value >= -2) && (value <= 2)) { id(espcam).set_brightness(value); state_return = true; }
if (("saturation" == name) && (value >= -2) && (value <= 2)) { id(espcam).set_saturation(value); state_return = true; }
if (("special_effect" == name) && (value >= 0U) && (value <= 6U)) { id(espcam).set_special_effect((esphome::esp32_camera::ESP32SpecialEffect)value); state_return = true; }
if (("aec_mode" == name) && (value >= 0U) && (value <= 1U)) { id(espcam).set_aec_mode((esphome::esp32_camera::ESP32GainControlMode)value); state_return = true; }
if (("aec2" == name) && (value >= 0U) && (value <= 1U)) { id(espcam).set_aec2(value); state_return = true; }
if (("ae_level" == name) && (value >= -2) && (value <= 2)) { id(espcam).set_ae_level(value); state_return = true; }
if (("aec_value" == name) && (value >= 0U) && (value <= 1200U)) { id(espcam).set_aec_value(value); state_return = true; }
if (("agc_mode" == name) && (value >= 0U) && (value <= 1U)) { id(espcam).set_agc_mode((esphome::esp32_camera::ESP32GainControlMode)value); state_return = true; }
if (("agc_value" == name) && (value >= 0U) && (value <= 30U)) { id(espcam).set_agc_value(value); state_return = true; }
if (("agc_gain_ceiling" == name) && (value >= 0U) && (value <= 6U)) { id(espcam).set_agc_gain_ceiling((esphome::esp32_camera::ESP32AgcGainCeiling)value); state_return = true; }
if (("wb_mode" == name) && (value >= 0U) && (value <= 4U)) { id(espcam).set_wb_mode((esphome::esp32_camera::ESP32WhiteBalanceMode)value); state_return = true; }
if (("test_pattern" == name) && (value >= 0U) && (value <= 1U)) { id(espcam).set_test_pattern(value); state_return = true; }
if (true == state_return) {
id(espcam).update_camera_parameters();
}
else {
ESP_LOGW("esp32_camera_set_param", "Error in name or data range");
}
ota:
password: "09e4b58a1d186b8b33d100548f33d796"
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
power_save_mode: none
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: "Esp32Cam Fallback Hotspot"
password: "GTIKgjitx2Re"
captive_portal:
# Example configuration entry
esp32_camera:
id: espcam
name: esp-cam
external_clock:
pin: GPIO0
frequency: 20MHz
i2c_pins:
sda: GPIO26
scl: GPIO27
data_pins: [GPIO5, GPIO18, GPIO19, GPIO21, GPIO36, GPIO39, GPIO34, GPIO35]
vsync_pin: GPIO25
href_pin: GPIO23
pixel_clock_pin: GPIO22
power_down_pin: GPIO32
resolution: 800x600
jpeg_quality: 10 # max. 63
max_framerate: 1.0fps
idle_framerate: 0.2fps
vertical_flip: true
horizontal_mirror: false
brightness: 2 # -2 to 2
contrast: 1 # -2 to 2
special_effect: none
# exposure settings
aec_mode: auto
aec2: false
ae_level: 0
aec_value: 300
# gain settings
agc_mode: auto
agc_gain_ceiling: 2x
agc_value: 0
# white balance setting
wb_mode: auto
output:
# white LED
- platform: ledc
channel: 2
pin: GPIO4
id: espCamLED
# red status light
- platform: gpio
pin:
number: GPIO33
inverted: True
id: gpio_33
light:
- platform: monochromatic
output: espCamLED
name: esp-cam light
- platform: binary
output: gpio_33
name: esp-cam led
switch:
- platform: restart
name: esp-cam restart
binary_sensor:
- platform: status
name: esp-cam status